
حفاظت و رله, مقالات
واحدها و سیستم های حفاظت الکتریکی

مارس
واحدها و سیستم های حفاظت الکتریکی
واحدها و سیستمهای حفاظت الکتریکی
این یک مقاله بلند و توصیفی در مورد انواع مختلف حفاظت سیستمهای الکتریکی و شبکههااست. با این مقاله، شما قادر خواهید بود انواع روشهای مختلف حفاظت الکتریکی، سیستمها و دستگاهها، هماهنگی و طبقهبندی حفاظت، حفاظت خطوط هوایی، حفاظت سیستم قدرت، حفاظت کابلهای فیدر، حفاظت ترانسفورماتور، حفاظت موتور، حفاظت ژنراتور، حفاظت بانکهای خازنی، حفاظتباسبار، حفاظتولتاژ و فرکانس و خیلی موارد دیگر را پوشش دهید. این مطلب را برای مطالعات بعدی نشانگذاریکنید.
فهرست مطالب
- معرفی سیستمهای حفاظت الکتریکی
- فناوری و ادوات حفاظتی
- ادوات حفاظتی
- دستگاههای هوشمند الکترونیکی (IED)
- کدها و رلههای حفاظتی
- حفاظت با فیوزها
- طبقهبندی و هماهنگی حفاظتی
- معرفی طبقهبندی و حفاظت
- اصول اساسی
- طبقهبندی و هماهنگی حفاظتی در شبکههای LV، MV و HV
- حفاظت کابلهای فیدر
- خطاها و حفاظت ترانسفورماتور
- خطاها و حفاظت خطوط هوایی
- حفاظت موتور
- نقصها و خطاهای رایج موتور
- ادوات حفاظت موتور
- نوار بیمتال (دو فلزی)
- رلههای اضافه بار دیجیتال الکترونیکی
- حفاظت ژنراتور
- خطاهای رایج ژنراتور
- ادوات حفاظت ژنراتور
- حفاظتهای متفرقه
- حفاظتولتاژ و فرکانس
- حفاظتباسبار
- حفاظتنقص بریکر
- Weak End Infeed
- حفاظت بانکهای خازنی
- مراجع
۱.معرفی سیستمهای حفاظت الکتریکی
تاسیسات و تجهیزات الکتریکی HV، MV و LV [1] در معرض خطاهای داخلی و خارجی هستندکه میتوانند باعث آسیبهای جدی در افراد و سایر تجهیزات شوند.
برای جلوگیری و به حداقل رساندن عواقب این خطاها، دستگاههای حفاظتی مربوط به تجهیزات که توانایی قطع جریان الکتریکی را دارند، مورد نیازهستند. برای درک بهتر تجهیزات حفاظتی، هر بخشی که یکسیستم حفاظتی و یا تجهیز حفاظتی را توضیح میدهد معمولترین خطاها مربوط به همان تجهیز بیان خواهدشد.
همچنین لازم به ذکراست که تمام واحدهای پارامترهای مکانیکی و الکتریکی و مضارب و زیرمجموعههای آنها که در سیستمهای حفاظتی دخیلهستند مطابق با سیستم SI (سیستم واحدهای بین المللی)هستند؛ استثنائات زمانی ایجاد میشوند که ساعت (h) ممکناست بجای ثانیه (s) استفادهشود و واحد انتخابشده برای درجه حرارت، درجه سانتیگراد °C (سلسیوس) بجای درجه کلوین Kاست، [K] = [C] + 273.15.
۲. فناوری و دستگاههای حفاظتی
۲.۱ دستگاههای حفاظتی
به منظور به حداقل رساندن زمان یک خطا، کلیدابزارها(کلید یا بریکر)(switchgears) و تجهیزاتی با ادوات حفاظتی فراهم میشوند تا خطاها را تشخیص دهند و بخش معیوب تاسیسات را جدا کنند.
اولا، تشخیص زودهنگام خطا و مکان آن، دوما، حذف سریع تجهیزات دارای خطا، به منظور برآوردهشدن موارد زیر لازماست:
- حفاظت از کل سیستم برای اطمینان از تداوم عرضه و تامین برق.
- برای به حداقل رساندن آسیب و هزینههای تعمیر.
- برای اطمینان از ایمنی پرسنل.
در گذشته، فیوزها معمولا به عنوان یک حفاظت در برابر اضافه جریانها و اضافه بارها استفاده میشدند، و هنوز هم در آمریکای شمالی و در برخی کشورها محبوب هستند، فیوزها همچنان در تاسیسات LV و کابلهای MV و ترانسفورماتورها با توان نامی تا 630-1250 kVA، استفادهمیشوند.
با این حال، پیچیدگی شبکهها و تجهیزات برای انتقال و توزیع قابل اطمینانتر توان، استفاده از دستگاههای حفاظتی دقیقتری را میطلبد.
امروزه رلههای حفاظتی، مورداستفاده قرار میگیرند، که قابل اطمینان تر و دقیقتر هستند و دارای توانایی تشخیص انواع دیگر خطاها نسبت به اضافه بارها و اضافه جریان هایی هستند که میتوانند در شبکهها و تجهیزات رخ دهند، این مطلب در بخشهای بعدی مورد بحث قرار خواهدگرفت، زمان حفاظت تجهیزات مورد تجزیه و تحلیل قرار خواهدگرفت.
رلهها برای بهره برداری تنظیممیشوند، و زمانیکه یک خطا شناسایی میشود، شروع به تریپدادن (قطع کردن مدار) میکنند.
هر طرح حفاظتی برای سیستم قدرت از اجزای زیر تشکیل میشود:
- رلههای تشخیص یا اندازهگیری خطا
- رلههای قطعکننده یا سایر رلههای کمکی
- مدارشکنها (Circuit Breaker)
- ترانسفورماتورهای اندازهگیری – ترانسفورماتور جریان (CT) و ترانسفورماتور ولتاژ (VT)
مدلهای اولیه رلههای حفاظتی، رلههای الکترومکانیکی بودند که هنوز در برخی کشورها و در تاسیسات قدیمی سیمکشی برق که مورد بازسازی قرار نگرفته اند، استفادهمیشوند.
این نوع از رلهها براساس جذب یک میله فلزی کار میکنند، طوریکه خروجی ثانویه ترانسفورماتور اندازهگیری از یک سیمپیچ عبور میکند، بنابراین در صورت عبور جریان، میدان مغناطیسی حاصله یک میله فلزی را جذب میکند، وقتی جریان قطعمیشود میله فلزی با یک فنر به محل اولیه خود برمیگردد. حرکت این میله فلزی باعثمیشود که کنتاکت تریپ (قطع) رله بستهشود.

امروزه رلههای حفاظتی الکترونیکی (حالت جامد) و رلههای مبتنی بر ریزپردازنده، معمولادر تاسیسات برقی بکار میروند.
رلههای الکترونیکی تنها دارای یک عملکرد حفاظتی هستند و رلههای مختلف باید برای عملکردهای مختلف استفادهشوند.
رلههای مبتنی بر ریزپردازنده دارای ویژگیهای در دسترس زیادی از جمله حفاظت، کنترل و نظارت هستند.
۲.۲ دستگاههای هوشمند الکترونیکی (IED)
رلههای مبتنی بر ریزپردازنده به عنوان دستگاه هایهوشمند الکترونیکی (Intelligent Electronic Devices (IED)) شناختهمیشوند، کهمیتوانند 5-12 عملکرد حفاظتی، 5-8 عملکرد کنترلی که دستگاههای جداگانه را کنترلکنند، عملکرد بستن خودکار، عملکرد خود نظارتی، و عملکردهای ارتباطی را ارائهکنند،
ویژگیهای اصلی آنها عبارتند از:
- بسیاری از توابع و عملکردها در یک رله واحد وجود دارد
- تنظیمات گروهی به راحتی در صورت تغییرات در پیکربندی فیدر قابل اعمالاست
- رلهها با خروجی قابل برنامهریزی
- پورتهای ارتباطی برای اتصال به SCADA – کنترل نظارتشده و گردآوری دادهها (سیستمها، مودمها، و رایانههای شخصی)
- دنبالهای از رویدادها برای بسیاری از خطاهای اخیر ذخیره میشوند
- موج نگاری (اسیلوگرافی) (Oscillography)یا گرفتن شکل موج – ذخیره دادههای شکل موج جریان و ولتاژ پیش و پس از خطا برای تجزیه و تحلیل خطا
- اندازهگیریها
- اینترلاکینگ Interlocking
- کمک به نگهداری مدارشکن (circuit breaker). وظیفه قطع خطا، در هر فاز،میتواند ثبتشود
- مکان یاب خطا – نمایش فاصله تا مکان خطا

در شکل2 نمونهای از یک IED را میتوان مشاهدهکرد.
توابع و پیچیدگی IED بایدبا توجه به تجهیزاتی کهباید حفاظت شوند، مشخصات شبکه و اقدامات مکمل مورد نیاز، تعریف شود.
IEDهای واقعی برای برآوردن الزامات استاندارد 61850 [IEC [2 طراحیمیشوند، که از پروتکل ارتباطی استفادهمیشود. این استاندارد به طور خاص برای اتوماسیون پست توسعه یافتهاست و قابلیت هماهنگی و ارتباطهای پیشرفته را فراهممیکند.
رشد تعداد نقاط حفاظت، کنترل و نظارت (مانیتورینگ) موجب افزایش قابل توجهی در حجم دادههای پستمیشود.
این دادهها معمولا ابتداییهستند و در یک فرم دیجیتال ذخیره میشوند. قبل از اینکه هر کاربر بتواند از مزایای این دادهها استفادهکند، این دادهها باید پردازش و تجزیه و تحلیل شوند.
در سیستمهای حفاظت متداول، سیگنالهایداده و کنترل، از طریق یک (Remote Terminal Unit (RTU (واحد پایانه دوردست)، از رله بهسیستم SCADA ارسال میشوند.
ممکناست کابلهای گسترده و گران قیمت بین bayهای مختلف در پست و اتاق کنترل نیاز باشد.
(معمولاسویچگیرها از قسمتهای مشابه متصل به هم در جهت شینه بندی تشکیل میشوند ، که به هر قسمت یک Bay میگویند)
درسیستم حفاظت مدرن که از یک رله IED استفادهمیکند، سیمکشی اتصال داخلی بین ترانسدیوسرها (مبدلها) و اندازهگیرها دیگر لازم نیست.
سیگنالهای داده و کنترل از رله IED، از طریق شبکه ارتباطی اختصاصی با سرعت بالا، مستقیما بهسیستم SCADA ارسال میشوند. زمانیکه یک IED به عنوان یک عنصر کنترلی و منبعداده استفادهمیشود، حجم دادهها به شدت افزایش مییابد.
برای فراهمکردن ارتباط لازم بین عناصر مختلفسیستم، یک شبکهداده LONWORKS به نام «شبکه عملیات محلی» LON) Local Operating Network)مورد استفاده قرارمیگیرد.
استاندارد 61850 IEC پروتکلهای مورد نیاز برای ارتباطات را تعریف میکند، که میتوانند شبکههای TCP/IP یا شبکههای LAN پست را با استفاده از اترنت با سوئیچ شدن با سرعت بالا دربربگیرند، تا زمانهای پاسخ دهی لازم زیر چهار میلی ثانیه برای رله حفاظتی بدست آید.
۲.۳ رلهها و کدهای حفاظتی
در پستها، تجهیزات، کلیدابزارهای(switchgears) ولتاژ بالا(MV) و ولتاژ متوسط(LV) و نیروگاهها، رلههای حفاظتی معمول تر در زیر نشان دادهشدهاند، و در براکتها کد آنها مطابق با استانداردهای [IEEE/ANSI [3 و IEC نشان دادهشدهاست:
- 01- حفاظت بلبرینگ (38)
- 02- حفاظت نقص بریکر (50 BF)
- 03- حفاظت دیفرانسیل باسبار (87B)
- 04- اضافهجریان دایرکشنال (جهتدار) زمین (67N/67G)
- 05- اضافهجریان دایرکشنال (جهتدار) فاز (67)
- 06- اضافهجریان آنی زمین (50N/50G)
- 07- اضافهجریان آنی فاز (50)
- 08- حفاظت از دستدادن و یا قطع تحریک (40)
- 09- از دستدادن و یا قطع فاز (48)
- 10- حفاظت اضافه تحریک (24)
- 11- رله اضافهفرکانس و رله افت فرکانس (81)
- 12- حفاظت دیفرانسیل خطوط هوایی (87L)
- 13- حفاظت دیستانس خطوط هوایی (21)
- 14- حفاظت اضافه بار (49)
- 15- حفاظت Over speed (اضافه سرعت) (12)
- 16- رله اضافه ولتاژ (59)
- 17- رله اتصال زمین محدوده (64G/64REF)
- 18- حفاظت برگشت توان (32)
- 19- رله اضافهجریان تاخیری زمین (51N/51G)
- 20- رله اضافهجریان تاخیری فاز (51)
- 21- حفاظت دیفرانسیل ترانسفورماتور (87P)
- 22- رله افت ولتاژ (27)
- 23- Weak end infeed (21WI)
- 24- حفاظت توالی فاز اشتباه (47)
نکته:در زیر تعاریف این حفاظتها به انگلیسی نیز ذکر شدهاند تا ترجمه باعث اشتباه در برداشت نشود
- 01- ( Bearing protection (38
- 02- ( Breaker failure protection (50 BF
- 03- ( Bus bar differential protection (87B
- 04- ( Directional earth overcurrent (67N/67G
- 05- ( Directional phase overcurrent (67
- 06- ( Instantaneous earth overcurrent (50N/50G
- 07- ( Instantaneous phase overcurrent (50
- 08- ( Loss of field/excitation protection (40
- 09- ( Loss of phase (48
- 10- ( Over-excitation protection (24
- 11- ( Overfrequency and underfrequency (81
- 12- ( Overhead line differential protection (87L
- 13- ( Overhead line distance protection (21
- 14- ( Overload protection (49
- 15- ( Overspeed protection (12
- 16- Overvoltage (59 )
- 17- ( Restricted earth fault (64G/64REF
- 18- ( Reverse power protection (32
- 19- ( Time delay earth overcurrent (51N/51G
- 20- ( Time delay phase overcurrent (51
- 21- ( Transformer differential protection (87P
- 22- ( Undervoltage (27
- 23- ( Weak end infeed (21WI
- 24- ( Wrong phase sequence protection (47
نکته :
به طور عمده در خطوط هوایی HV، ترانسفورماتورهای قدرت HV و ترانسفورماتورهای قدرت LV با توان نامی بالای 3-4 MVA، به منظور افزایش قابلیت اطمینان و ایمنیسیستم، یک روش معمول استفاده از دو مجموعه حفاظتیاست – یکی “حفاظت اصلی” و یکی “حفاظت پشتیبان”.
۲.۴ حفاظت با فیوزها
یک فیوز گونه ای از یک مقاومت کم اهماست که به عنوان یک «وسیله فداشونده» عمل میکند تا حفاظت در برابر اضافه جریان را فراهم کند، این نوع دستگاه حفاظتی همچنان در برخی تاسیسات LV و MV بکار می رود.
قسمت ضروری یک فیوز، یک سیم یا نوار فلزیاست که در زمان عبور جریان بیش از حد ذوب می شود، و باعت قطع مدار میشود، به طوریکه از آسیب بیشتر توسط گرمای بیش از حد یا آتش سوزی جلوگیری میکند.
این سیم یا نوار فلزی به عنوان یک مقطع کوچک با هادیهای مدار مقایسه میشود و توسط یک محفظه (پوشش) احتراق ناپذیر محصور میشود.
اجزاء فیوزها از روی، مس، نقره، آلومینیوم یا آلیاژها ساختهمیشوند تا مشخصات و ویژگیهای پایدار و قابل پیشبینی را فراهم کنند.
پوشش فیوز میتواند از سرامیک، شیشه، پلاستیک، فایبرگلاس، ورقه میکای قالبی یا فیبر فشرده قالبی بسته به تولیدکننده، کاربرد و کلاس ولتاژ باشد.
فیوزها بر روی نگهدارندههای فیوز، به خصوص برای هر نوع یا خانواده ای از فیوزها و ولتاژهای نامی مانند فیوز HRC نصب میشوند.
نمونهای از فیوزها و نگهدارندههای آنان در شکل های 3 و 4 نشان دادهشدهاند.


خصوصیات الکتریکی اصلی فیوزها عبارتند از:
- ولتاژ نامی
- جریان نامی (In): حداکثر جریانی که فیوز میتواند به طور مداوم بدون قطع مدار هدایت کند.
- ظرفیت شکست(Breaking capacity) (I1): حداکثر جریان موثری که فیوز میتواند قطع کند. این جریان حداکثر مقدار تست فیوز است. این جریان بسیار زیاداست، معمولا بین 20 و 63 کیلوآمپراست.
- حداقل جریان قطع(Minimum interrupting current) (Ir): حداقل جریانی که میتواند جاری شود و فیوز را قطعکند.
- جریان قراردادی غیر-فیوزی(Conventional non-fusing current) (Inf): مقدار جریانی که اتصال فیوز قادر به حمل آن جریان در یک زمان مشخص (زمان قراردادی)است بدون آنکه ذوبشود، این جریان به صورت مضربی از In بیان میشود (مثلا، Inf = 1.25 * In).
- ذوب اسمی (I2t): اندازهگیری انرژی مورد نیاز برای ذوب عنصر فیوز (براساس قانون ژول) و مقداری است که برای هر عنصر فیوزی مختلف ثابتاست.
- منحنی زمان-جریان: زمان تحریک فیوز (سرعت) را به عنوان تابعی از جریان (معمولا توسط تولیدکننده، مطابق با استانداردها است) نشان میدهد.
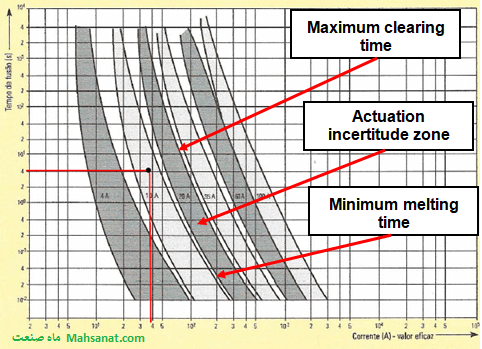
شکل5 نمونههای از یک منحنی زمان-جریان را نشانمیدهد.
دمای محیط، پارامترهای عملیاتی فیوز را تغییر خواهدداد و ضریب کاهش حد مجاز دمایی(temperature derating) نیازاست.
به عنوان یک مثال، فیوزی که برای 1 آمپر در 25 درجه سانتی گراد تنظیم شدهاست، می تواند تا 10 درصد یا 20 درصد جریان بیشتر را در 40- درجه سانتی گراد هدایت کند و ممکناست در 80 درصد مقدار نامیاش در 100 درجه سانتی گراد باز (ذوب)شود.
مقادیر عملیاتی در هر خانوادهای از فیوزها متفاوت خواهدبود و در دیتاشیتهای (برگههای داده) سازنده ارائه میشوند.
فاکتورهای اصلی انتخاب یک فیوز عبارتند از:
- جریان عملیاتی نرمال
- ولتاژ نامی (AC یا DC)
- درجه حرارت محیط
- جریان اضافه بار و مدت زمانی که در آن فیوز بایدباز شود
- حداکثر جریان خطای موجود
- پالس ها، جریان های سِرج (غیرعادی)( Surge)، جریان های هجومی(Inrush)[1]، جریان های راه اندازی، و گذراهای مدار
- محدودیت های اندازه فیزیکی، همچون طول، قطر، یا ارتفاع
- ویژگی های فیوز (عامل فُرم / نوع نصب، سهولت جدا سازی، هدایت محوری، نشانه بصری و غیره)
- ویژگی های نگهدارنده فیوز، در صورت لزوم
- کاربرد
- مقررات و استانداردهای سیم کشی ملی
استاندارد فرانسوی NF EN 60269، فیوزها را براساس منحنیهای زمانی، توابع و کاربردها دستهبندی میکند.
این دستهبندی، که به طور گسترده در بسیاری از کشورها استفادهمیشود، عبارتاست از:
- gL/gC
- توابع
- حفاظت کابلها و ادوات الکتریکی. تفاوتبین دو فیوز یا وجود حاشیهای بیندو جریان نامی (مثلا 160 و 100 آمپر) تضمینمیشود.
- کاربردها
- حفاظت در تمام سطوح توزیع توان الکتریکی در صنایع و بخش خانگی در برابر اضافه بار و اتصال کوتاهها. تابلو برقهای اصلی، تابلوهای برق فیدرها، اتاقکهای محفظهای اصلی.
- aM
- توابع
- حفاظت مستقیم موتورها، بایددر ارتباط با یک وسیله حفاظتی خارجی (رله حرارتی) کار کند. تفاوت راحت با فیوزهای gG که در بالادست قرار گرفتهاند. تفاوتبین دو فیوز تضمین میکند که حاشیهای از دو جریان نامی (مثلا 160 و 100 آمپر) وجوددارد.
- کاربردها
- حفاظت موتورهای ولتاژ پایین
- gR
- توابع
- فیوز حفاظتی فوقالعاده سریع برای نیمه هادیها، محدودیتهای کم جریان، I2*t پایین
- کاربردها
- حفاظت توان نیمه هادیِ راه اندازهای نرم، رلههای استاتیک، منبع تغذیه بدون وقفه (UPS)، درایورهای سرعت متغیر، فرکانس
زمانیکه تاسیساتی توسط فیوزها حفاظت میشود،
سوئیچهای جداکننده (switch-disconnectors)در بالادست فیوزها، به دلایل ایمنی باید بکار روند، تا جداسازی تاسیسات را پیش از جایگزین کردن یک فیوز یا انجام برخی کارهای تعمیراتی تضمین کند.
در جایی که فقط از فیوزها برای حفاظت استفادهمیشود، تنها اضافه جریانهای فاز شناسایی خواهندشد، و پیش بینی رلههای حفاظتی برای سایر خطاها ضروریاست. برای جریان نشتی یا جریان خطای زمین، GFCI (قطعکننده مدار خطای زمین) (Ground Fault Circuit Interrupter)سپس بکار میرود.
در این وضعیت، سوئیچها باید با یک سیمپیچ بازشونده مجهز شوند، که توسط حفاظت داخلی تجهیزات نیز تحریک شود.
یکی دیگر از پیش احتیاطها ایناست که فیوزها باید با یک دستگاه مکانیکی (پین مهاجم striker pin) که باعث باز شدن سوئیچ میشود، مجهز شوند، تا در صورتی که تنها یک فیوز عمل کرد، قطع کامل تاسیسات دارای خطا تضمین شود.
فیوزها همچنین باید با یک دیسک رنگی مجهز شوند تا در زمانی که این عنصر میترکد، این دیسک در بدنه فیوز ساختهمیشود تا نشانگذاری بصری یک المان ترکیده را نشاندهد.
۳. طبقهبندی و هماهنگی حفاظتی
۳.۱ معرفی طبقهبندی و حفاظت
در زمان تعیین نقاط تنظیم رلههای حفاظت یا جریان نامی فیوزها و مدارشکنهای LV (مانند ACB (مدارشکن هوایی Air Circuit Breaker))، باید اطمینان حاصلشود که مقادیر انتخابشده برای حفاظت تجهیزات مناسب هستند و مدارشکنهایی که تریپ میدهند یا فیوزهایی که عمل میکنند، تنها مربوط به مدار معیوب باشند و به سایر دستگاههای حفاظتی مربوط نشوند، که این مورد میتواند باعث اختلالات جدی در شبکه و در کیفیت و تداوم سرویس دهیشود.
برای دستیابی به این هدف، مطالعه زمین کردن و هماهنگی حفاظتی ضروریاست.
۳.۲ اصول اساسی و اولیه
مطالعات هماهنگی حفاظت رلهها، برای تعیین تنظیمات حفاظت رله انجاممیشود.
سطوح خطا باید برای تمام شرایط عملیاتی سیستم تعیینشود، این امر برای تعیین توانایی حفاظت رلهها برای تشخیص و رفع خطاهای سیستم بکار میرود.
طرحهای حفاظتی طوری تنظیم میشوند که تا حد ممکن کمترین بخش سیستم الکتریکی را جدا کنند، پس اختلال ناشی از خطا به حداقل میرسد.
مدت زمان عملکر رله برای قطع بخش معیوب تعیین میگردد تا زمان های نامی مورد نیاز جهت قطع قسمتهای دارای خطا، پایداری سیستمو الزامات اختیارات قانونی تامین شود. ما مراقبت میکنیم تا حاشیه های عملیاتی حفاظت رله، هم در جریان و هم در زمان، به طور صحیح تعیین شوند، به طوریکه بخشهای معیوب را به طور موثر حذف کنند.
زمانی که رلههای دیستانس روی فیدرهای ولتاژ بالای دو مداره تنظیم میشوند، توالی صفر پیوند متقابلبین مدارها در نظر گرفتهمیشود، به طوریکه احتمال آورریچ(Overreach) یا آندرریچ(Under reach) حداقلمیشود.
مشخصات عملیاتی رلهها و تنظیمات آنها، به منظور دستیابی به تنظیم بهینه، باید به دقت هماهنگ شوند.
این هدف اساسا برای از مدار خارج کردن فقط بخش خطادار سیستماست و به منظور حداقل کردن وقفه عرضه و اطمینان از پایداری، اجازهدهد مابقی سیستم قدرت سرویس دهیکند.
تنظیم بهینه(Selectivity)، یا تمایز (فرق گذاری)، بیندستگاههای حفاظتی می تواند به این صورت تعریفشود که «هماهنگی دستگاه های حفاظتی، به منظور اینکه اگر خطایی در هر نقطه از شبکه رخداد، توسط دستگاه حفاظتی بالادستی حذفشود، این دستگاه حفاظتی بلافاصله در بالادست این خطا قرار دارد و تنها با این دستگاه حفاظتی خطا رفع میشود.»
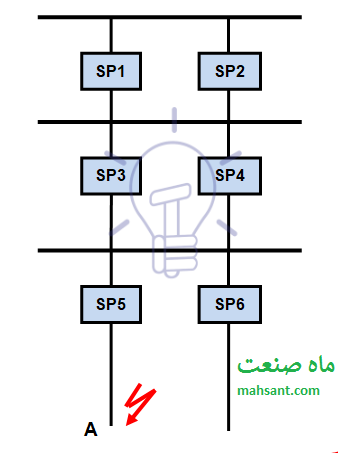
اجازهدهید نمونهای از این تعریف را ببینیم، به دیاگرام تک خطی شکل6 نگاهکنید، که در آن سیستمهای حفاظتی SP1 تا SP6 وجوددارند:
تنظیم بهینه به این معنیاست که اگر خطایی در نقطه A رخ دهد، تنها سیستم حفاظتی که باید فعالشود SP5است، و سایر سیستم های حفاظتی نباید فعال شوند.
دو اصل برای ایجاد تنظیم بهینه استفاده میشود:
- تمایز جریان
- تمایز زمان
۳.۳ طبقهبندی(Grading) و هماهنگی(coordination) حفاظتی در شبکههای LV، MV و HV
برای انجام مطالعات طبقهبندی و هماهنگی حفاظتی، تنظیمات و پیچیدگی شبکه بایددر نظر گرفتهشود.
شبکههای توزیع LV و شبکههای مشترکین معمولا پیکربندی شعاعی دارند.
و شبکههای توزیع MV معمولا دارای ترکیبی از شبکه شعاعی و شبکه از دوسو تغذیه بدون هیچ نقطه تنظیمی و یک پیچیدگی مهمهستند.
شبکههای مشترکین MV معمولا دارای پیکربندی شعاعیهستند، اگرچه در بسیاری از نیروگاهها یک شبکه از دوسو تغذیه بدون هیچ نقطه تنظیمی بکار میرود.
با توجه به پیچیدگی شبکهها، مطالعات طبقهبندی و هماهنگی حفاظتی برای شبکههای انتقال HV و شبکههای توزیع MV، نیازمند مهندسین متخصص و استفاده از نرمافزارهای خاص تجزیه و تحلیل مانند ETAP، PSS/E، EPSO و PTWاست.
طبقهبندی و هماهنگی حفاظتی برای شبکه مشترکین MV معمولا راحتتر استو میتوانداز دستورالعملهای پایهای که بعدا در این بخش بحث خواهدشد، تبعیتکند.
توجه
توجه ویژهای بایددر مرز شبکه شرکت توزیع برق (ورودی) و شبکه مشترکینشود و پروتکل هماهنگی حفاظتی بایدبین هر دو نهاد ایجادشود.
برای شبکههای LV، با استفادهاز مدارشکنها و / یا فیوزها، تنظیمات بهینه میتواندبه صورت “مدارشکن / مدارشکن”، “فیوز / فیوز”، و “مدارشکن / فیوز” باشد کهمیتواند توسط مقایسه با «منحنیهای زمان-جریان» برای مقدار خاصی از جریان خطا، با استفاده از اصول «تمایز جریان» و «تمایز زمان» که در بالا اشارهشد، انجامشود.
تمایز جریان برای حفاظت در برابر اضافه بار استفادهمیشود و این حفاظت در صورتی که نسبت بین حدود آستانه تنظیم بالاتر از 1.6 باشد، قابل انتخاباست.
تمایز زمان برای حفاظت در برابر اتصال کوتاهها استفاده میشود، که از یک مدارشکن یا فیوز در بالادست با تاخیر زمانی استفادهمیشود که بنابراین تریپدادن دستگاه پایین دست سریعتر انجام شود؛ این حفاظت در صورتی که نسبت بین حدود آستانه حفاظت اتصال کوتاه کمتر از 1.5 نباشد، قابل انتخاباست.
۴. حفاظت کابلهای فیدر
خطا و حفاظتهای کابلها و فیدرهای کابلی کاملا در مطلب زیر توضیح دادهشدهاست:
حفاظتکابلها
۵. خطاها و حفاظت ترانسفورماتور
حفاظت و خطاهای ترانسفورماتور کاملا در مطب زیر توضیح دادهشدهاست:
حفاظت ترانسفورماتور قدرت و خطاهای آن
۶. خطاها و حفاظت خطوط هوایی
برای هدایت بهتر خواننده، ما این مطلب را در اینجا تحت عنوان «خطاها و حفاظت خطوط هوایی» بروز میکنیم.
۷. حفاظت موتور
۷.۱ نقصها و خطاهای رایج موتورها
مهماست نقایص و خطاهای موتور را برای تعیین مناسبترین ادوات حفاظتی برای هر حالت، بدانیم و درککنیم. شما همچنینباید در مورد شرایط مهم مربوط به کنترل و حفاظت موتور آگاهی داشتهباشید.
موتورها، ماشینهای غیراستاتیکی هستند که تحت فشارهای الکتریکی و مکانیکی قرار میگیرند.
نقایص موتورها به سه نوع اساسی تقسیممیشوند: الکتریکی، مکانیکی و مکانیکی که به حالت الکتریکی منتهیمیشود.
نقایص و خطاهای رایج موتورها عبارتند از:
- خرابی یاتاقان
- شکست عایقی
- روتور قفلشده
- گرم شدن بیش از حد
- اضافهبار (الکتریکی و مکانیکی)
- عدم تعادل فاز و هرگونه عدم تعادل ولتاژ منجر به عدم تعادل جریان حتی بیشتر خواهدشد.
- حرکت عقبگرد
- ناهماهنگی شفت
- ارتعاش (لرزش)
گرم شدن بیش از حد میتواندبه دلیل موتور با اندازه نامناسب، خنک سازی ناکافی در سرعت پایین زمانیکه از درایوهای متغیر سرعت ((Variable Speed Drives (VSD) استفادهمیشود، رخ دهد که این امر مانند تجهیزات نامعلوم و شرایط محیطی داغ باعث تغییر بار روی موتور میشود.
شکست عایقی، منجر به سوختن سیمپیچهاشده، که باعث اتصال کوتاه درون موتور یا درون مدار تغذیهکننده توان برای موتور میشود،و ممکناست به دلیل گرمای بیش از حدِ اضافه بار و اضافه ولتاژ باشد.
حدود 80 درصد نقایص موتورهای الکتریکی به دلیل آسیب سیمپیچی در استاتور موتور و نقص یاتاقاناست.
خرابی یاتاقان در موتورها میتواندنشانهای از یاتاقانهای نامناسب برای کاربرد موتور باشد.
یک موتور که به طور عمودی نصبشده، نیازمند یاتاقانهای متفاوت نسبت به موتوری استکه به صورت افقی نصب شدهاست. موتوری که یک درایو بزرگ یا چند تسمهای را میچرخاند نیازمند یاتاقانهایی خواهدبود که بتواند بارهای شعاعی بزرگ را کنترل کند. موتوری که به یک صفحه پایه کج و ناهموار پیچ شدهباشد، دچار پیچ خوردگی خواهدشد.
یاتاقانها معمولا در مقایسه با سایر اجزاء عمده موتور، کوچک هستند، و باعث آسیب پذیرتر شدن آنهامیشود؛ برخی مطالعات بیش از نیمی از نقایص موتور را به بد عمل کردن یاتاقان نسبت میدهند، که اکثر این خرابیها نتیجه روغنکاری بیش از حد یا خیلی کماست. یکی دیگر از علل قابل توجه نقص یاتاقان، عدم تعادلاست.
عدم تعادل شفت، یاتاقانها را قبل از اینکه طول عمر مفید خود را کار کنند، نابودمیکند. شفت موتور باید مستقیما در یک خط با شفتی باشد که میچرخاند این امر میتواندتنها با استفادهاز تکنیکهای دقیق تراز کردن مانند لیزر حاصلشود.
مشکلات دیگری که ممکناست در موتورها رخ دهد، عبارتند از:
- ورود آب و گردوغبار به درون سیمپیچ استاتور یا ایجاد اتصال کوتاه در پایانه موتور
- ناهمسطح محکم شدن دو پایه موتور
- نصب اشتباه یا نوع یاتاقان اشتباه موتور
- عدم تعادل الکتریکی یا مکانیکی
نویز نشان دهنده مشکلات موتوراست اما معمولا منجر به آسیبنمیشود. با این حال، نویز، معمولا با ارتعاش همراهاست.
ارتعاش به چندین روش میتواند باعث آسیبشود. ارتعاش باعث تکان دادن ،لقی سیمپیچ هاشده و به طور مکانیکی با تق تق کردن، پوسته پوسته کردن یا ساییدن مواد به عایق آسیب می رساند. ضعیف سر سیم های اتصالات از حرکت بیش از حد و جرقه زدن براش در کموتاتورها یا حلقههای گردان جریان نیز از ارتعاش حاصل میشوند.
در نهایت، ارتعاش میتواند یاتاقانها را با سائیدن از شکل خودشان خارج کند یا با شلشدن یاتاقانها در پوستهها، نقص یاتاقانها را سرعت بخشد.
هر زمان که نویز یا ارتعاش در یک موتور در حال کار پیدا شوند، منبع آن باید به سرعت جدا و اصلاحشود.
آنچه که به عنوان یک منبع آشکار از نویز و ارتعاش به نظر میرسد میتواند نشانهای از یک مشکل پنهان باشد. بنابراین، بررسی جامعی اغلب مورد نیازاست.
نویز و ارتعاشات میتوانند ناشی از شفت نامتعادل موتور باشد یا میتوانند از ماشین گردنده یا سیستم انتقال قدرت به موتور منتقلشود. نویز و ارتعاشات همچنین میتوانند نتیجه عدم تعادل الکتریکی یا مکانیکی در موتور باشند.
عدم تعادل الکتریکی
عدم تعادل الکتریکی زمانی رخ میدهد که جذب مغناطیسی بین استاتور و روتور در اطراف محدوده موتور ناهمواراست. این امر باعثمیشود که شفت کجشود و همانطور کهمیچرخد یک عدم تعادل مکانیکی را ایجاد میکند. عدم تعادل الکتریکی معمولا یک نقص الکتریکی، همچون سیمپیچی باز استاتور یا روتور، یک نوار یا حلقه باز در قفس سنجابی موتورها یا سیمپیچهای کوتاه شده میدان در موتورهای سنکرون را نشان میدهد. یک گپ هوایی ناهموار، که معمولا ناشی از یاتاقانهای بد شکلاست، نیز باعث عدم تعادل الکتریکی میشود.
علت اصلی عدم تعادل مکانیکی ناشی از نصب کردن کج، شفت خم شده، روتور با تعادل ضعیف، قطعات شل روی روتور یا بدنه ی بلبرینگهااست. نویز نیز میتواندناشی از ضربهزدن فن به قاب، پوشش، یا اشیاء خارجی در داخل پوشش باشد. اگر یاتاقانها بد باشند، همانطور که توسط سروصدای بیش از حد یاتاقان مشخصمیشود، تعیین اینکه چرا یاتاقانها دارای نقص هستند، ضروریاست.
یکی دیگر از مشکلاتی که موتورها میتوانند با آن مواجه شوند، زمان استارت طولانیاست. اگر موتور تحت استارتهای پیاپی باشد، سیمپیچهای روتور یا میلههای روتور میتوانند تا نقطهای داغ شوند که در آن نقطه اتصالات الکتریکی بین میلههای روتور و حلقههای انتهایی آسیب میبینند.
۷.۲ ادوات و دستگاههای حفاظت موتور
مهم نیست که موتورها با چه ولتاژ نامی و اندازه ای هستند، آنها باید در برابر اضافه جریان (اتصال کوتاه) و اضافه بارها حفاظت شوند.
موتورهای LV با اندازه کوچک و متوسط معمولا تنها در برابر اضافه بارها و اتصال کوتاه ها محافظت میشوند و موتورهای LV و موتورهای MV نیز دارای حفاظتهای دیگری نیزهستند.
حفاظتهای اضافه بار و اضافه جریان باید طوری طراحی شوند که نسبت به جریان های هجومی در زمان راه اندازی حساس نباشند، تا از قطع توان بی مورد جلوگیریکند.
برای موتورهای LV، حفاظت در برابر اضافه جریانها و اتصال کوتاهها میتواندتوسط فیوزها انجام شود، که مرتبط با سوئیچهای قطع کننده (switch-disconnectors)یا مدارشکنهای قطع آنی(instantaneous trip circuit breakers) هستند که نسبت به مقادیر فوری (تقریبا لحظه ای) جریان یک اتصال کوتاه، خطای زمین، یا جریان روتور قفلشده پاسخ میدهند.
مدارشکنهای زمان معکوس(Inverse time circuit breaker) دارای ویژگیهای قطع حرارتی و آنی (thermal and instantaneous)هستند و برای تریپدادن در سطح استاندارد از قبل تنظیممیشوند.
این رایجترین نوع مدارشکنها استکه در ساختمانها برای موارد خانگی، تجاری، و ساختمانهای بزرگ استفادهمیشوند.
عمل حرارتی این مدارشکنها به گرما واکنش نشانمیدهد. اگر ورودیها و خروجیهای تهویه ی یک موتور برای جذب گرما از سیمپیچهای موتور کافی نباشند، این گرما توسط عمل حرارتی این مدارشکن شناسایی خواهدشد.
اگر اتصال کوتاه رخ دهد، عمل مغناطیسی این مدارشکن، مقادیر آنی جریان را تشخیص خواهدداد و مدار را قطع خواهدکرد.
فیوزها معمولا برای حفاظت در برابر اضافه بارها مناسب نیستند، زیرا اگر برای ارائه حفاظت اضافه بار برآورد شوند، در هنگامی که موتور استارتمیشود به دلیل جریان هجومی زیاد موتور، عملمیکنند، اگرچه میتوانند به عنوان یک حفاظت پشتیبان برای اضافه بار مورداستفاده قرارگیرند.
حفاظت با فیوزها، در زمانیکه تنها یک فیوز عمل میکند و بسوزد، خطر آسیب تکفازی را برای موتور دارد مگر اینکه حفاظت تکفاز فراهم بشود؛ این موضوع بعدا در این فصل بحث خواهدشد.
موتورهای LV و موتورهای MV با اندازه بزرگ توسط رلههای اضافه جریان (50؛ 50N؛ 51؛ 51N) که به CT متصل میشوند، در برابر اتصال کوتاهها محافظت میشوند.
این حفاظت در برابر اضافه بارها معمولا توسط رله اضافه بار حرارتی انجاممیشود.
این نوع رله میتواند از انواع زیر باشد:
۷.۲.۱ نوار دو فلزی (بی متال)( Bi-metallic strip)
حفاظت حرارتی اضافه بار، جریان زیاد زمان راه اندازی یک موتور را که مدت آن کوتاهاست، به طور دقیق از جریان اضافه بار جدا میکند.
سیمپیچ گرمشونده و عمل نوار بیمتال یک تاخیر زمانی را ایجادمیکند که به موتور اجازه میدهد زمان کافی برای راهاندازی و رسیدن به جریان نرمال را بدون تریپ حرارتی اضافه بار را داشتهباشد.
حفاظتهای حرارتی اضافه بار میتواند به صورت دستی یا خودکار، بسته به کاربرد آنها، تنظیم مجدد شوند و تنظیمکنندهای داشتهباشند که به آنها اجازهمیدهد تا به طور دقیق با جریان موتور تنظیم شوند.
درجه حرارت محیط که در آن یک شروعکننده (استارتر) و یک موتور قرارمیگیرند، باید در زمان انتخاب نوار بیمتال مد نظر قراربگیرد زیرا درجه حرارت بالای محیط زمان تریپ اضافه بار را کاهش میدهد.
در صورتی که یک موتور در محیطی با درجه حرارت خنک تر نسبت به استارتر قراربگیرد، زمان کاهش یافته تریپ اضافه بار(Reduced overload trip time can) میتواند منجر به تریپ ناخواسته شود، و هنگامی که موتور در محیطی با دمای گرمتر نسبت به استارتر قرار میگیرد، موجب فرسودگی موتور میشود.
ادامه
اکثر دستگاههای حرارتی اضافه بار برای استفاده در حداکثر دمای 40 درجه سانتی گراد هستند، و کاهش حد مجاز حرارتی(derating) برای رله ممکناست مورد نیازباشد.
اکثر رلهها در محدوده 85 تا 115 درصد مقدارشان قابل تنظیمهستند.
برخی مدلها دارای جبرانسازی محیط در دسترس هستند. نقطه تریپ یک دستگاه جبران ساز محیطی تحت تاثیر دمای محیط قرار نمیگیرد و همواره با همان مقدار جریان انجام کار میکند.
این نوع از رلهها معمولا در موتورهای LV با اندازه کوچک و متوسط بکار میروند.
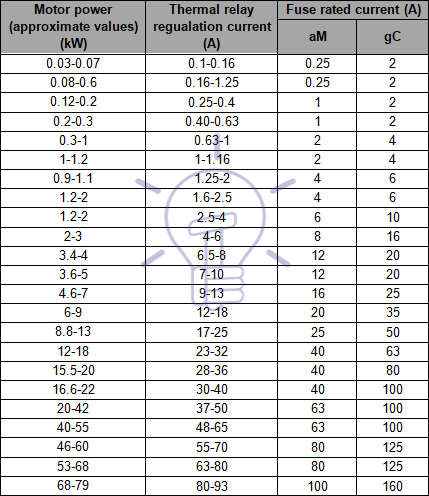
استانداردها و دادههای تولیدکنندگان معمولا مقررات توصیهشدهای برای نقطه تنظیم این نوع از رلهها را مطابق با توان نامی موتور نشانمیدهند؛ جدولهای مشابهی نیز جریانهای نامی توصیهشدهای از فیوزها (نوع aM و gG – بخش 2.4 را ببینید) و مدارشکنهای آنی که مربوط به رلهها برای حفاظت اضافه جریانهستند، را نشانمیدهند، همانطور که در جدول 3 نشانداده شدهاست.
۷.۲.۲ رلههای اضافه بار دیجیتال الکترونیک
این نوع از حفاظت برای موتورهای LV و موتورهای HV بزرگ بکار می روند، و شامل یک ریزپردازنده هستند. این دستگاهها میتوانند گرم شدن سیمپیچهای موتور را با نظارت (مانیتورینگ) جریان موتور مدل کنند و آنها همچنین شامل توابع اندازهگیری و ارتباطی هستند.
حفاظت رایج موتورهای LV و MV بزرگ معمولا توسط دستگاههای حفاظتی زیر انجام میشود:
- 1- حفاظت اضافه بار: 49
- 2- اضافهجریان آنی فاز: 50
- 3- اضافه جریان آنی زمین: 50N/50G
- 4- اضافهجریان تاخیر زمانی فاز: 51
- 5- اضافه جریان تاخیر زمانی زمین: 51N/51G
- 1- Overload protection: 49
- 2- Instantaneous phase overcurrent: 50
- 3- Instantaneous earth overcurrent: 50N/50G
- 4- Time delay phase overcurrent: 51
- 5- Time delay earth overcurrent: 51N/51G.
در برخی شرایط توصیه نمیشود که از موتورها در برابر اضافه بارها محافظت شود؛ این موارد پمپهای آب آتشنشانی و فنهای خروجی دود هستند.
موتورهای LV خیلی بزرگ و موتورهای MV گران هستند، و معمولا عاقلانهاست که برنامههای حفاظت جامعتری برای آنها ارائهشود.
چنین برنامههایی عبارتند از:
- 1- مانیتور دمای یاتاقان و محافظت آن (38)
- 2- حفاظت دیفرانسیل (87M)
- 3- حفاظت توالی استارت ناقص / زمان شروع طولانی (66)
- 4- توالی فاز منفی (حفاظت فاز معکوس)
- 5- حفاظت گرمای بیش از حد
- 6- حفاظت عدم تعادل فاز یا نقص فاز (47)
- 7- حفاظت روتور قفلشده
- 8- حفاظت افت ولتاژ و اضافه ولتاژ (به ترتیب 27 و 59)
- 9- مانیتور و حفاظت ارتعاش (39)
- 10- دستگاههای مانیتور دمای سیمپیچ و حفاظت آن
- 1- (Bearing temperature monitors and protection (38
- 2- (Differential protection (87M
- 3- (Incomplete start sequence / long start time protection (66
- 4- (Negative phase sequence (phase reversal protection
- 5- Overheating protection
- 6- (Phase unbalance or phase failure protection (47
- 7- Stall or locked rotor protection
- 8- (Under and over voltage protection (27 and 59, respectively
- 9- (Vibration monitors and protection (39
- 10- Winding temperature monitors and protection devices
ادامه
حفاظت دیفرانسیل اغلب برای موتورهای با اندازه متوسط و بزرگ با ولتاژهای تغذیه بزرگتر از حدود 4 کیلوولت، وهمراه با مدارشکن های (circuit breakers)که به طور الکتریکی عمل میکنند (تریپ شانت (shunt trip)است) استفادهمیشود.
حفاظت دیفرانسیل تشخیص، جهت و رفع سریع خطا را روی سیمپیچهای استاتور موتور فراهم میکند.
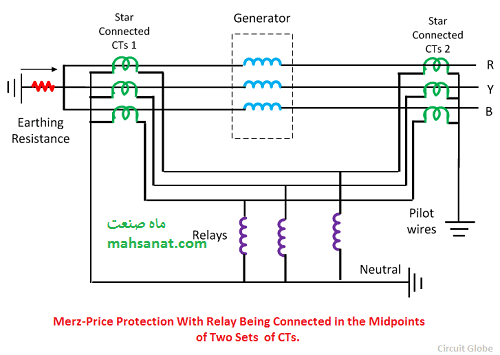
در جایی که سیستم تامین توان به طور جامع زمین شدهاست، حفاظت دیفرانسیل هم خطاهای فاز به فاز و هم خطاهای فاز به زمین را تشخیص خواهدداد. با حفاظت دیفرانسیل جریان در هر انتهای هر سیمپیچ مقایسه میشود، تا تعیین کند که چه زمانی شرایط خطا وجود دارد.
این عملکرد به دو مجموعه CT نیاز دارد، یکی در ابتدای فیدر موتور، و دیگری در نقطه ستاره.
تابع حفاظت دیفرانسیل تنها میتوانددر صورتی که هر دو سمت هر فاز استاتور برای اتصال خارجی بیرون آوردهشدهباشند، بکار رود، به طوری که این جریان فاز که به درون هر فاز میرود و بیرون می آید، می تواند اندازه گیری شود. عنصر دیفرانسیل، جریانی را که از هر فاز می آید را از جریانی که به هر فاز میرود تفریق میکند و نتیجه را مقایسه می کند یا از سطح پیکاپ دیفرانسیل کم میکند.
اگر این اختلاف مساوی یا بزرگتر از سطح پیکاپباشد، یک تریپ رخ خواهدداد.
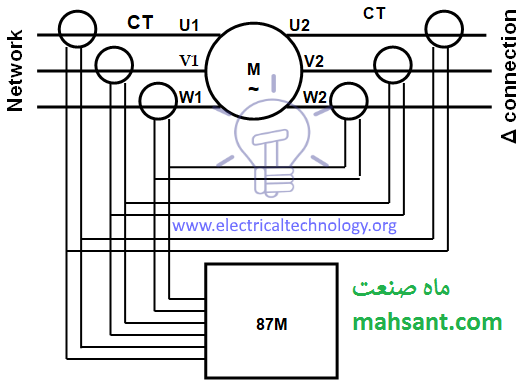
شکل19 نمونهای از این حفاظت را نشانمیدهد.
نکته:
به خاطر نیاز به دقت به اندازهگیری بالا در حفاظت دیفرانسیل باید از CT نوع X استفادهکرد.
شش CT در این مجموعه استفادهمیشود، در طول راه اندازی موتور، مقادیر از دو CT روی هر فاز ممکناست مساوینباشند، زیرا دو CT کاملا مشابه نیستند و جریانهای نامتقارن ممکناست باعثشوند CT روی هر فاز خروجیهای متفاوتی داشتهباشند.
برای جلوگیری از تریپ ناخواسته در این پیکربندی، سطح دیفرانسیل میتواند با حساسیت کمتری تنظیم شود، یا تاخیر زمانی دیفرانسیل میتواندگسترش یابد تا مشکل طول مدت زمان راه اندازی موتور برطرفشود.
زمان اجرای دیفرانسیل سپسمیتواند متناسب با کاربری به طور دقیق تنظیمشود به طوریکه رله خیلی سریع واکنش نشاندهد و نسبت به سطوح پایین جریان دیفرانسیل حساس باشد.
حفاظت گرمای بیش از حد سیمپیچیها معمولا با “آشکارسازهای دمای مقاومتی RTD(Resistance Temperature Detectors)” انجام میشود و ترمیستور و دستگاههای بستن خودکار می توانند نصب شوند. اتصال یک تقویتکننده مجزا، به فن موتور کمک میکند تا مشکل گرمای بیش از حد را، در زمان استفادهاز یک VSD برای کنترل سرعت موتور، حل کند.
نکته :
برای سنسور دما روی سیمپیچهای موتور هم میتوان RTD و هم PTC استفادهکرد. در صورت استفادهاز PTC نمیتوان دمای سیمپیچها را خواند ولی در صورت رسیدن دما به حد دمای حفاظتی (مثلا 120 درجه) مقدار مقاومت PTC زیادشده و به سمت بی نهایت میرود و از این ویژگی میتوان استفادهکرد و در صورت رسیدن دمای موتور مثلا به ۱۲۰ درجه رله تریپ میدهد.
با استفاده از سنسور RTD میتوان هر لحظه دمای سیمپیچ را دید و اندازهگیری کرد.
توالی ناقص استارت / زمان طولانی استارت منجر به گرمای بیش از حد روتورمیشود.
از آنجایی که اندازهگیری فیزیکی گرمای روتور در موتورهای قفس سنجابی امکان پذیر نیست، لازماست گرما با اندازهگیری جریان روتور که از استاتور برای تحریک روتور کشیدهمیشود، تعیین شود. یک ماکت حرارتی از روتور با استفاده از منحنی I2t ایجاد میشود.
ممنوعیت راه اندازی مجدد (ریستارت)، در صورتی که رله تعیین کند روتور به حد گرمایی رسیده که راه اندازی آن به روتور آسیب خواهدزد، کاربر را از راه اندازی موتور منعمیکند. بنابراین رله تنها در صورتی اجازه ریستارت میدهد که روتور دارای ذخیره حرارتی کافی برای راهاندازی را داشتهباشد.
حفاظت یاتاقان معمولا توسط RTD و ترمیستور برای مانیتور دما انجام میشود.
حفاظت ارتعاش از سنسورها / شتاب سنجهایی استفادهمیکند که معمولا در مکان کلیدها روی موتور و یاتاقان ها جا دارند.
از آنجاییکه یاتاقانها بخشی هستند که بار مکانیکی را تحمل میکنند، شتاب سنجها باید در ورودی و خروجی گذاشتهشوند.
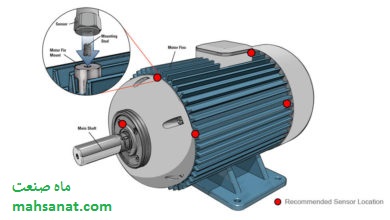
شکل 20 نمونهای از سنسورهای ارتعاش و مکانهای توصیهشده را نشانمیدهد.
امروزه IED (بخش 2.1 را ببینید) که تمام توابع حفاظتی مورد نیاز را به صورت یکجا دارند، به طور رایج برای موتورهای LV بزرگ و موتورهای MV استفادهمیشوند.
۸. حفاظت ژنراتور
۸.۱ خطاهای رایج ژنراتور
خطاهای ژنراتور معمولا به خطاهای داخلی و خارجی طبقهبندی میشوند؛ خطاهای داخلی به دلیل مشکلاتی در داخل اجزاء ژنراتور هستند و خطاهای خارجی به دلیل شرایط عملیاتی غیرطبیعی و خطا روی شبکههای خارجی هستند.
خطاها روی محرک اولیه [7] و سیستم های مرتبط با آن مورد بحث قرار نخواهند گرفت، زیرا آنها معمولا در مرحله طراحی مکانیکی تجهیزات تعریف میشوند.
با این حال، آنها باید برای اهداف تریپ دادن، با حفاظتهای ژنراتور همگام شوند.
خطاهای داخلی میتوانند الکتریکی یا مکانیکی باشند:
-
خطاهای استاتور
- 1- گرمای بیش از حد سیم پیچی ها
- 2- خطای فاز به فاز سیم پیچی ها
- 3- خطای فاز به زمین سیم پیچی ها
- 4- خطای حلقه به حلقه(Inter-turn fault)
-
خطاهای روتور
- خطای زمین
- اتصال کوتاه سیمپیچها (روتور کلافی یا روتور سیمپیچی(wound rotor))
- گرمای بیش از حد
-
افت میدان / تحریک
-
ژنراتور خارج از سنکرون
-
بهره برداری موتور(حالت موتوری شدن ژنراتور)
-
داغ شدن یاتاقان و عدم فشار روغن کاری
-
ارتعاش
-
Stator faults
- 1- Windings overheating
- 2- Windings phase-to-phase fault
- 3- Windings phase-to-earth fault
- 4- Inter-turn fault
-
Rotor faults
- 1- Earth fault
- 2- Winding short-circuit (wound rotor)
- 3- Overheating
-
Loss of field / excitation
[8]
-
Generator Out-of-Step
-
Motor operation
-
Bearings overheating and lack of pressure of lubrication oil
-
Vibration
داغی سیم پیچ های استاتور می توانند ناشی از اضافه بارهای دائمی و خطاهای فاز به فاز و زمین باشد که به علت شکست عایقی هستند.
اتصال کوتاه سیم پیچ روتور منجر به افزایش جریان تحریک و کاهش ولتاژ تحریک می شود.
داغ شدن روتور ناشی از جریان های نامتعادل در استاتور است، به دلیل:
- تریپ تک قطبی
- خطای سیمپیچ استاتور
- توالی فاز منفی
توالی فاز منفی و جریان های نامتعادل در استاتور جریان می یابند و شار آرمیچری تولید میکنند که در جهت مخالف با روتور میچرخد، که باعث ایحاد جریانهای گردابی در حجم روتور میشود.
این جریانهای گردابی، که در فرکانسی معادل دو برابر فرکانس سیستم هستند (50 یا 60 هرتز)، داغی محلی را در اطراف روتور تولید خواهندکرد که می تواند باعث ضعیف شدن حلقهها و گوههای نگه دارنده روتور شود.
هنگامی که تحریک (یا میدان) یک ژنراتور از بین میرود، توان راکتیو از سیستم قدرت به ژنراتور جریان مییابد. سپس این ژنراتور سنکرون بودن خود را از دست میدهد و به صورت یک ژنراتور القایی، در سرعتی بالاتر از سرعت سنکرون، میچرخد.
در سرعت بالاتر از سرعت سنکرون، روتور شروع به نوسان میکند و تلاش میکند تا به سرعت سنکرون برسد، که منجر به داغی و آسیبهای دیگر میشود. تا زمانی که سیستم پایداراست، توان راکتیو (MVAr) به سمت ژنراتور جریان مییابد و این ماشین به تحویلدادن توان اکتیو (MW) ادامه میدهد.
حالت موتوری ژنراتور زمانی رخ میدهد که تغذیه بخار یا آب توربین قطع میشود و ژنراتور از سیستم الکتریکی توان میکشد.
در توربینهای بخار، بخار به عنوان یک خنککننده عمل میکند، تیغهها را در یک دمای ثابت نگه می دارد. قطع تغذیه بخار، میتواند باعث داغی تیغهها شود. در برخی ماشینها، افزایش دما بسیار پاییناست، و حالت موتوری می تواند برای زمان قابل ملاحظهای تحملشود.
کاویتاسیون
توربین آبی (هیدرولیک) دارای پدیده کاویتاسیون(cavitation) (شکل گیری و سپس فرسایش سریع حفرهها در مایع – نواحی کوچک بدون مایع (“حباب ها”)است.

این پدیده معمولا زمانی اتفاق میافتد که یک مایع تحت تغییرات سریع فشاراست که باعث شکلگیری حفرههایی میشودکه در آنها فشار نسبتا کماست.
کاویتاسیون عامل قابل توجهی از فرسایشاست. هنگام ورود به سطوح فشار بالا، حبابهای کاویتاسیون که روی سطح فلز از داخل میترکند، باعث ایجاد تنش حلقوی از طریق ترکیدنهای مکررمیشوند، که منجر به فرسودگی سطحی فلزمیشود.
خطاهای خارجی سیستم قدرت در ژنراتور و شرایط بهره برداری غیر طبیعی عبارتند از:
- خطاهای اتصال کوتاه خارجی
- اتصال غیرسنکرون ژنراتور
- خروج از حالت سنکرون (لغزش قطب یا از دستدادن سنکرون بودن)
- اضافه بارها
- سرعت بیش از حد
- عدم تعادل فاز و توالی فاز منفی
- افت فرکانس و افزایش فرکانس
- افت ولتاژ و اضافه ولتاژ
- External short-circuit faults
- Non-synchronized connection of generator
- Out-of-step (pole slipping or loss of synch)
- Overloads
- Overspeed
- Phase unbalance and negative phase sequence
- Under and over frequency
- Under and over voltages
یک خطای رفع نشده یا آهسته رفعشده روی شبکه سیستم، میتواند باعثشود که ژنراتورها شروع به لغزش قطبها کنند، یا اینکه با باقیمانده سیستم به حالت خروج از سنکرون بودن بروند.
چنین شرایطی نامطلوباست، زیرا تنشهای مکانیکی مضری به شفت اعمال میشود، و نوسانات شدید توان، تاثیر مخربی روی ولتاژهای سیستم قدرت دارد.
از دست دادن سنکرون بودن (همگامی) میتواندناشی از یک اتصال کوتاه خارجی، خاموش کردن یک بار القایی مهم، یا توسط یک خطا در سیستم تحریک باشد.
سرعت بیش از حد نتیجه خاموشی ناگهانی کل بار یا یک کاهش قابل توجه باراست.
۸.۲ دستگاهها و ادوات حفاظت ژنراتور
ژنراتورها گرانترین تجهیزات در سیستمهای قدرت هستند.
بنابراین، طرحهای حفاظتی قابل اطمینان برای تشخیص و رفع سریع خطای آنها برای حداقل کردن آسیب و کاهش زمان تعمیر تا حداقل ممکن، لازم و ضروریاست.
حفاظت در برابر خطاهای فاز به فاز سیمپیچهای استاتور، از طریق یک رله دیفرانسیل انجام میشود، که اصول آن قبلا در سایر بخشها بحثشد. این وسیله حفاظتی توانایی تشخیص خطاهای حلقه به حلقه سیمپیچ را ندارد.
زمانی که چنین نوعی از خطا رخ میدهد، ولتاژ کاهش مییابد و یک ولتاژ توالی منفی ظاهرمیشود؛ این ولتاژ توسط یک رله ولتاژ (ANSI/IEEE/IEC کد 60) متصلشده به VT آشکارمیشود.
حفاظت خطاهای زمین استاتور به نوع زمین کردن استاتور بستگی دارد.
برای سیستم زمینشده با مقاومت، یک رله اضافه جریان متصلشده به CT “نوع حلقوی” درون اتصال خنثی یا یک رله ولتاژ در ترمینالهای مقاومت، میتواند بکار رود.
تحت شرایط عادی و بدون خطا، هیچ جریانی از مقاومت عبور نمیکند و ولتاژ در ترمینالها برابر صفراست.
برای حالت زمین کردن از طریق یک ترانسفورماتور، یک رله ولتاژ، ولتاژ را در مقاومت متصلشده به ثانویه ترانسفورماتور استفادهشده، بررسی میکند.
تحت شرایط عادی و بدون خطا، ترانسفورماتور زمین هیچ ولتاژ ثانویهای تولید نمیکند، و هیچ ولتاژی به رله اعمالنمیشود. زمانیکه یک خطای زمین در استاتور رخ دهد، ولتاژی در ترمینالهای ثانویه ترانسفورماتور زمین ایجاد میشود، و رله ولتاژ عمل میکند.
 s) مشروط میشوند.
s) مشروط میشوند.
۹.۴ Weak End Infeed
حفاظت Weak end infeed مکمل حفاظت دیستانساست که در صورتی که مقدار جریان خطا در خط هوایی کمتر از مقررات نقطه تنظیم حفاظت دیستانس باشد، بکار میرود.
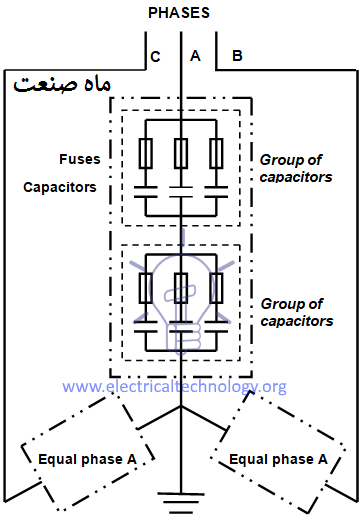
۹.۵ حفاظت بانکهای خازنی
هنگامی که ضریب قدرت (توان) مطرحمیشود، هر فاز یک بانک خازنی توسط گروهی از خازنها به صورت سری برای مشارکت در بهبود ضریب توان، شکلمیگیرند. سپس، 3 فاز به صورت ستاره متصل میشوند، که مطابق با بهره برداری شبکهها، همانطور که در شکل27 نشان دادهشدهاست، نقطه خنثی ایزوله یا زمینمیشود.
خطاهای رایج بانکهای خازنی عبارتند از:
- خطا یا اتصال کوتاه خازنها در کابلهای اتصال.
- اتصال کوتاه بین واحدها و ساختار فلزی قفسهها یا تابلوهای برق (خطای فاز به زمین).
- اضافه بارهای ایجادشده توسط هارمونیکهای شبکه.
- شکست دیالکتریک (عایقی) به علت اضافه ولتاژهای شبکه یا رعدوبرق.
زمانیکه گروهی از خازنها خراب میشوند و نقطه خنثی زمین میشود، بانک خازنی نامتعادل خواهدشد و جریانی در خنثی به گردش درخواهدآمد.
هر خازن یا گروهی از خازنها معمولاتوسط فیوزها حفاظت میشوند، که قبلا توسط سازنده نصب میشوند.
فیوزها باید دارای مشخصه I2t باشند که باعث خواهدشد فیوز با جریان هجومی ناشی از اتصال بانک خازنی منفجر نشود (عمل نکند).
دستگاههای رایج حفاظتی برای بانکهای خازنی عبارتند از:
- 1- اضافه جریان آنی فاز (50)
- 2- اضافه جریان آنی زمین (50N/50G)
- 3- اضافه جریان تاخیر زمانی فاز (51)
- 4- اضافه جریان تاخیر زمانی زمین (51N/51G)
- 5- حفاظت اضافه ولتاژ (49)
- 1- (Instantaneous phase overcurrent (50
- 2- (Instantaneous earth overcurrent (50N/50G
- 3- (Time delay phase overcurrent (51
- 4- (Time delay earth overcurrent (51N/51G
- 5- (Over voltage protection (49
۱۰. مراجع:
[1] HV:
ولتاژ بالا (بیش از 60 کیلوولت)؛ MV: ولتاژ متوسط (بین 1 تا 60 کیلوولت)؛ LV: ولتاژ کم (کمتر از 1 کیلوولت).
[2] IEC:
کمیسیون الکتروتکنیکی بینالمللی
[3] IEEE:
مؤسسه مهندسان برق و الکترونیک. ANSI: مؤسسه استانداردهای ملی آمریکا.
[4]
جریان خازنی باقیمانده در حالت خطای فاز به زمین (IC) توسط معادله IC = 3XCU محاسبهمیشود، که در آن XC راکتانس خازنی کابل و U ولتاژ فاز به فاز شبکهاست.
[5]
در این مقاله ترانسفورماتورهای گازی (ترانسفورماتور ایزولهشده توسط گاز) (GIT) تجزیه و تحلیل نمیشوند.
[6] rms:
مقدار موثر
[7]
محرک اولیه، عنصریاست که برای راه اندازی ژنراتور استفادهمیشود و میتواند موتورهای درونسوز (مثلا مجموعههای ژنراتورهای دیزل)، توربینهای گاز، توربینهای بخار، توربینهای باد و توربینهای آبی باشد.
[8]
میدان در یک ژنراتور AC متشکل از کویلهای هادیها درون ژنراتور است که ولتاژ را از یک منبع (تحریک خواندهمیشود) دریافتمیکند و یک شار مغناطیسی را تولید میکند. این شار مغناطیسی در میدان، آرمیچر را قطعمیکند تا ولتاژی را تولید کند. این ولتاژ نهایتا ولتاژ خروجی ژنراتوراست.
[1] HV: High Voltage (V ≥ 60 kV); MV: Medium Voltage (1 kV < V < 60 kV); LV: Low Voltage (V ≤ 1 kV).
[2] IEC: International Electrotecnical Comission.
[3] IEEE: Institute of Electrical and Electronics Engineers. ANSI: American National Standards Institute.
[4] Residual capacitive current in the case of phase-to-earth fault (IC) is calculated by the equation IC = 3XcU, where Xc is the capacitive reactance of the cable and U the phase-to-phase voltage of the network.
[5] In this article Gas Insulated Transformers (GIT) are not analasyzed.
[6] rms: root mean square.
[7] Prime mover is the component that is used to drive the generator and may be combustion engines (the case of diesel generator sets), gas turbines, steam turbines, wind turbines and hydraulic turbines.
[8] The field in an AC generator consists of coils of conductors within the generator that receive a voltage from a source (called excitation) and produce a magnetic flux.
The magnetic flux in the field cuts the armature to produce a voltage. This voltage is ultimately the output voltage of the generator.
[1] Inrush currents
با سلام
واقعا عالی بود
ممنون