
الکتروموتور, مقالات
خزش و ریپل گشتاور موتور القایی

بهمن
در این مقاله قصد داریم در مورد خزش و ریپل گشتاور موتور القایی (کاگینگ و کراولینگ موتور القایی) صحبت کنیم.
پس با ما همراه باشید.
خزش و ریپل گشتاور موتور القایی (کاگینگ و کراولینگ )
خصوصیات مهمی که معمولاً توسط موتورهای القایی قفس سنجابی نشان دادهمیشود خزش و ریپل گشتاوراست[1].
این خصوصیات نتیجه عملکرد نادرست موتوراست یعنی موتور یا با سرعتی بسیار آهسته در حال کاراست و یا بار آن را نمیگیرد.
در ادامه به بررسی این خصوصیات میپردازیم.
خزش موتور القایی
مشاهده شدهاست که موتور القایی نوع قفس سنجابی تمایل به حرکت با سرعت بسیار کم در مقایسه با سرعت سنکرون آن دارد ، این پدیده به عنوان خزش موتور القایی شناختهمیشود.
سرعت حاصل تقریباً 1/7th سرعت سنکرون آناست. اکنون این سؤال پیش میآید که چرا این اتفاق میافتد؟ این عمل به دلیل شارهای هارمونیکی تولیدشده
در شکاف سیمپیچ استاتور هارمونیکهای فرد مانند 3 ، 5 ، 7 و غیره است. این هارمونیکها علاوه بر گشتاور سنکرون ، میدانهایی با گشتاور اضافی به غیر از میدان گشتاور اصلی را ایجاد میکنند.
موتور القایی سه فاز
همچنین،
گشتاور تولید شده موتور القایی توسط این هارمونیک ها در جهت رو به جلو یا عقب به ترتیب با سرعت Ns / 3 ، Ns / 5 ، Ns / 7 میچرخند.
در اینجا ما فقط هارمونیکهای 5 و 7 را در نظر می گیریم و مابقی را نادیده میگیریم.
این گشتاور تولیدشده توسط هارمونیک پنجم که به عنوان یک عمل ترمز عمل می کند از نظر مقدار کماست ، بنابراین می توان از آن صرف نظر کرد.
اکنون هارمونیک هفتم گشتاور چرخشی رو به جلو را با سرعت سنکرون Ns / 7 تولید میکند.
از این رو ، گشتاور خالص رو به جلو برابراست با مجموع گشتاور تولید شده توسط هارمونیک 7 و گشتاور اصلی . گشتاور تولیدشده توسط هارمونیک 7 به حداکثر مقدار خود درست زیر 7/1 از Ns میرسد
و در این نقطه لغزش زیاداست. در این مرحله موتور به سرعت عادی خود نمیرسد و چرخش خود را با سرعتی که بسیار پایینتر از سرعت عادی خوداست ادامه میدهد.
این امر باعث خزیدن موتور با سرعت کمتر از 7/1 سرعت سنکرون و ایجاد سر و صدای شدید میشود.
سرعت دیگری که در آن موتور خزش میکند 13/1 از سرعت سنکروناست.
cogging موتور القایی (ریپل گشتاور)
این ویژگی موتور القایی وقتی به وجود میآید که موتور را ه اندازی نمی شود. بعضی اوقات به دلیل ولتاژ کم اتفاق میافتد. اما دلیل اصلی بروز مشکل در موتور به دلیل کوگینگاست
که در آن شکافهای استاتور با شکافهای روتور قفل میشوند. همانطور که میدانیم در استاتور و روتور موتور القایی تعدادی از شکافها وجود دارد.
هنگامی که شکافهای روتور از نظر تعداد برابر با شکافهای موجود در استاتور باشند ، خود را به گونهای تراز میکنند که هر دو با یکدیگر روبرو شوند و در این مرحله رلوکتانس مسیر مغناطیسی کماست حداقل و موتور سعی می کند این وضیعت را حفظ کند.
این ویژگی موتور القایی cogging نام دارد. جدا از این ، یک دلیل دیگر برای cogging وجود دارد. اگر فرکانسهای هارمونیک به خاطر هارمونیکهای موجود در منبع توان با فرکانسهای شیارها منطبق و همزمان شود ،
باعث نوسان گشتاور میشود. در نتیجه ، cogging رخ میدهد. این ویژگی همچنین به قفل شدن دندانهای مغناطیسی موتور القایی معروفاست.
روش هایی برای غلبه بر Cogging
این مشکل با اتخاذ چندین اقدامات به راحتی قابل حلاست. این راه حلها به شرح زیراست:
1- تعداد شکافها در روتور نباید برابر با تعداد شیارهای موجود در استاتور باشد.
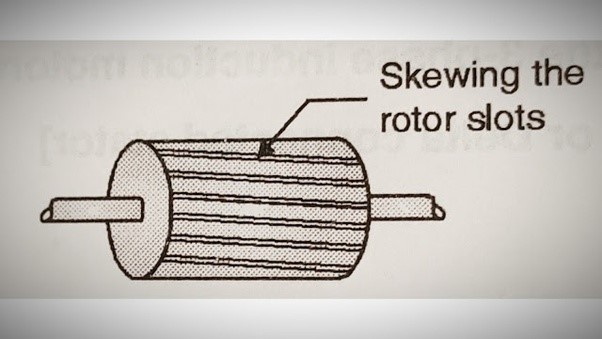
2- چرخاندن شکافهای روتور
که شیارها در آن مقداری چرخش داشتهباشند.
[1] crawling and cogging
مقالات مرتبط :
عملکرد انواع موتور الکتریکی – موتور DC- موتور آسنکرون (القایی)- موتور سنکرون