

مرداد
پایداری سیستم قدرت
در این برگه قصد داریم به بررسی مفهوم پایداری سیستم قدرت بپردازیم و انواع آن را بررسی کنیم. پس با ما همراه باشید.
فهرست مطالب
1- پایداری سیستم قدرت
2- پایداری حالت ایستا
3- پایداری گذرا
4- پایداری دینامیک
1- پایداری سیستم قدرت
پایداری سیستم قدرت، توانایی یک شبکه قدرت برای بازیابی حالت تعادل خود حتی پس از قرارگرفتن در معرض اختلال است.
هدف اصلی که باید در انتقال توان درککرد، این است که حداکثر مقدار توان واقعی برای انتقال به بار در نظر گرفتهشدهاست. دستیابی به این امر به دلیل تغییرات مکرر بار (اعم از افزایش یا کاهش) عملاً امکانپذیر نیست، اما با روشها و تحلیلهای مختلف میتوان سیستم را در پایدارترین منطقه پیادهسازی کرد و اینجاست که این حوزه مطالعاتی به تصویر کشیدهمیشود.

با درک نوع ناپایداری وارد شده به سیستم، شبکه برای دستیابی به حداکثر انتقال توان به شرایط عملیاتی تعادل خود باز میگردد. اجازه دهید ابتدا پارامترهای اصلی را که باید برای اطمینان از یک شبکه پایدار در نظر گرفتهشوند، بررسی کنیم.
معادلهای که برای تعیین توان واقعی انتقالیافته در یک خط انتقال بکارمیرود، عبارتاست از:
Pe = EV sin𝛿/ X
که،
Pe = مقدار توان واقعی انتقالیافته
E = ولتاژ تحریک
V = ولتاژ ترمینال
𝛿 = زاویه بار / زاویه توان (زاویه بین فازور ولتاژ تحریک و فازور ولتاژ پایانه)
X = راکتانس کل
بنابراین رابطه را میتوان به صورت زیر ترسیم کرد:
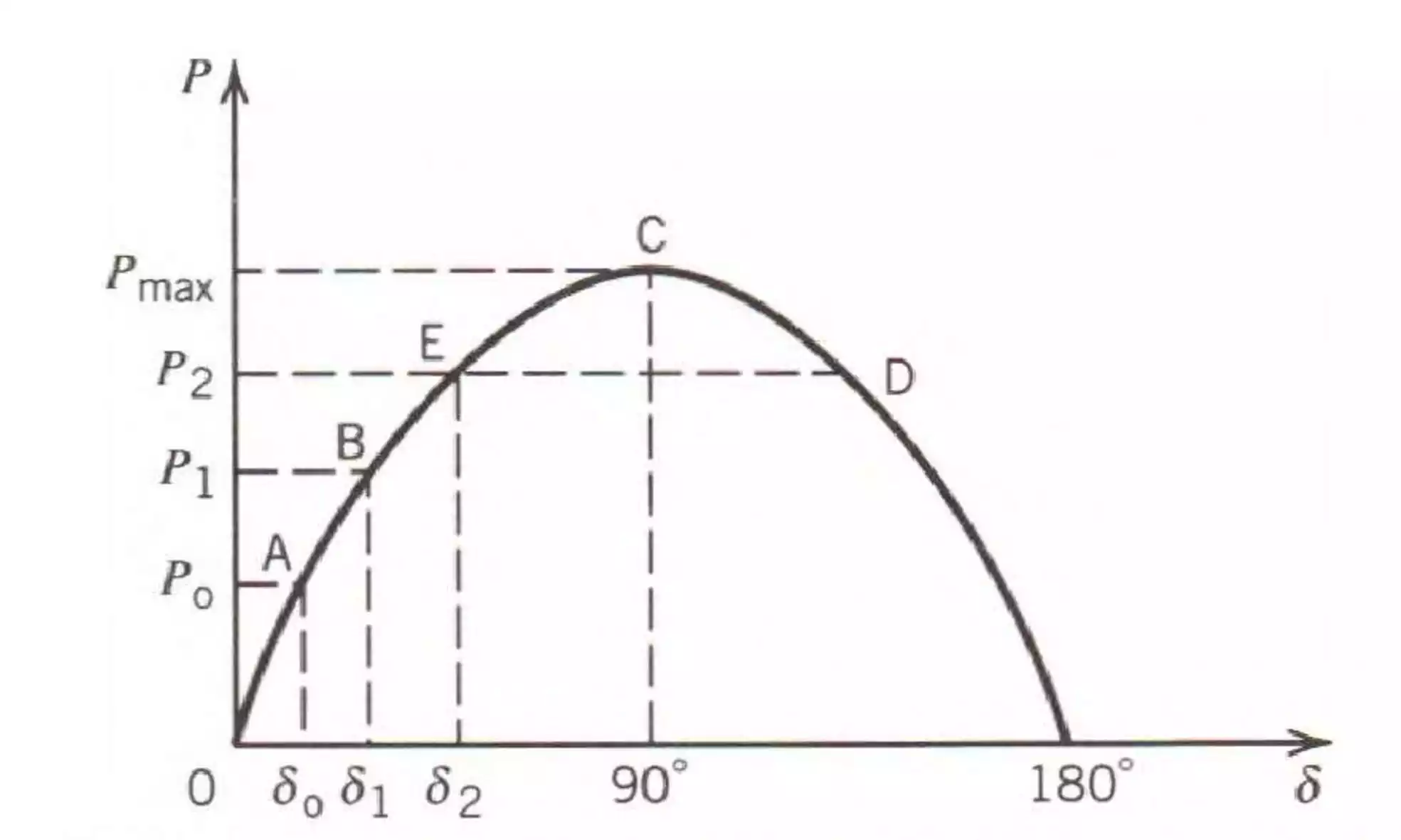
این منحنی که به عنوان منحنی زاویه توان تعریف میشود، نشانمیدهد که با افزایش زاویه بار، توان انتقالی نیز افزایش مییابد و در 90 درجه به حداکثر میرسد. اما با افزایش بیشتر توان انتقالی به میزان قابل توجهی کاهش مییابد. بنابراین، زاویه بار باید به گونهای حفظ شود که قدرت کاهش نیابد. تغییر در بار می تواند چندین مسئله را بوجود آورد که عبارتند از:
- تغییر در فرکانس
- تغییر در زاویه بار
- و تغییر در مشخصات چرخشی
بنابراین، تغییر در بار باعث میشود که سیستم همزمانی خود را از دست بدهد و با کمک کنترل فرکانس بار مجدداً بازگردانده شود. پایداری سیستم را میتوان بسته به نوع اختلالاتی که در سیستم ایجاد میکند، طبقه بندی کرد. این طبقه بندی عبارتست از:
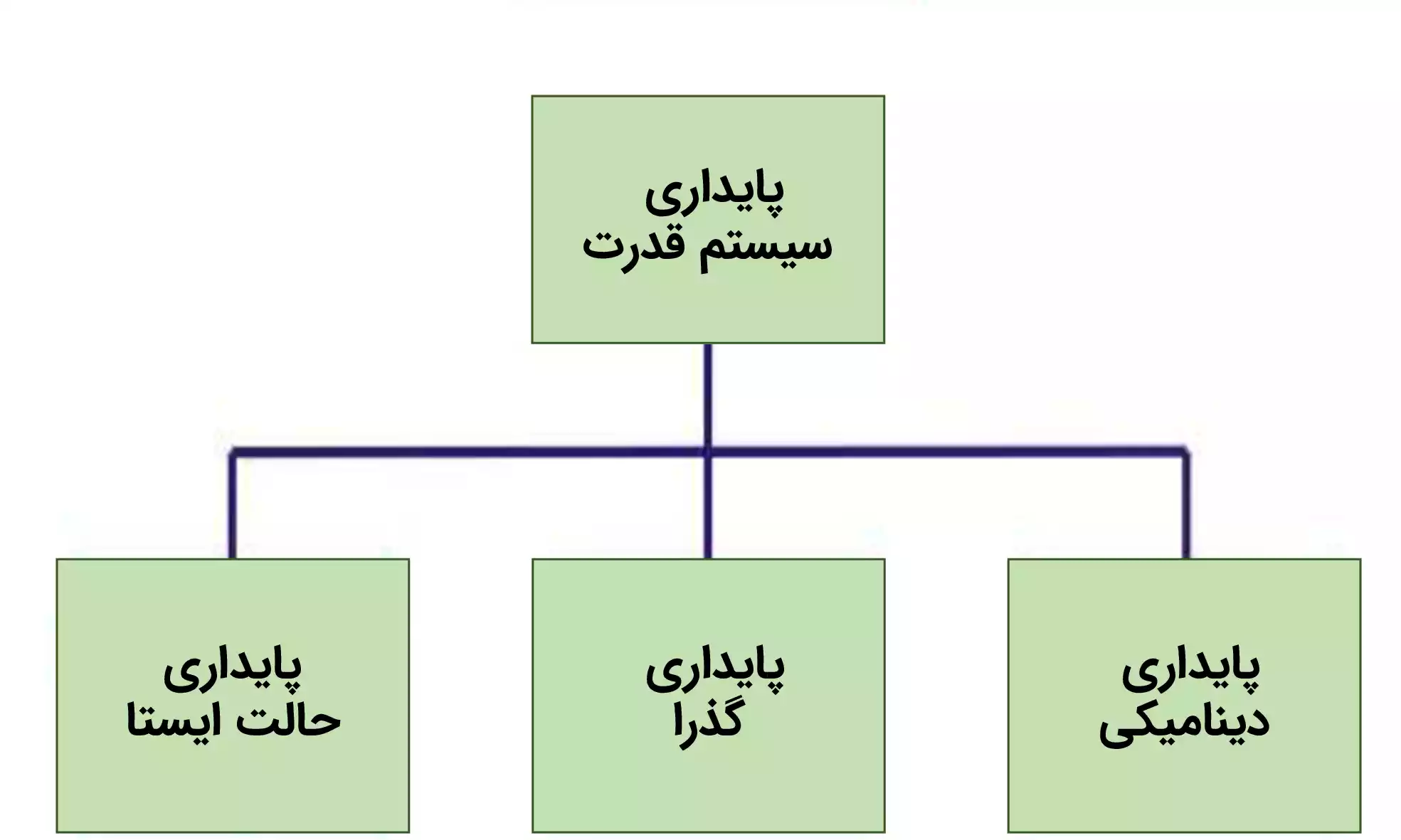
2- پایداری حالت ایستا
ثبات حالت پایدار عبارت است از توانایی ماشین (ماشین سنکرون) برای رساندن حداکثر توان واقعی به بارها با حفظ تعادل، حتی زمانی که تغییرات کوچک و تدریجی بار را تجربه میکند. تغییرات کوچک بار ممکناست زمانی رخ دهد که فرکانس نوسانات ایجاد شده توسط روتور، کمتر از فرکانس طبیعی سیستم باشد (اصولاً تغییر در ویژگیهای چرخشی ماشینهای سنکرون ممکن است در این دسته قرار گیرد).
3- پایداری گذرا
پایداری گذرا توانایی ماشین در ارائه حداکثر توان واقعی به بارها، در صورت تجربه تغییرات ناگهانی و زیاد بار است. این نوع تغییر بار به دلیل وقوع خطای سه فازی است که برای چند سیکل به طول میانجامد. انواع خطاهای سه فاز ممکن است:
- مورد 1: در نزدیکی شینه رخ دهد.
- مورد 2: بین انتهای ارسال و دریافت رخ دهد.
- مورد 3: روی شینه رخ دهد.
4- پایداری دینامیک
پایداری دینامیک، توانایی سیستم برای پایدار ماندن در برابر اختلالات کوچکتر، که بیش از چند ثانیه طول نمیکشد، است. این اختلالات کوچکتر ممکن است به دلیل تغییرات کوچک تصادفی در بار یا سطوح تولید برق رخ دهد. اگر این اختلالات در چند ثانیه برطرف شوند، سیستم از نظر دینامیک پایدار است.
مرجع
مطالب مرتبط