
برد کنترلی, مقالات
WoodWard 2301A

تیر
فهرست مطالب
- مقدمه
- جلوگیری از تخلیه الکتریسیته ساکن
- فصل اول : اطلاعات کلی
- فصل دوم : نحوه عملکرد
- فصل سوم : نصب
- فصل چهارم : راه اندازی و تنظیمات
مقدمه
این مقاله برگرفته و ترجمه شده از وب سایت شرکت سازنده بوده ، لذا در اینجا ما از وارد کردن اطلاعات غیر ضروری خودداری کرده وحتی المقدور به بیان نکات ضروری از جمله نصب ، نحوه کارکرد ، تنظیمات و نکات ایمنی در مورد این سیستم می پردازیم.
این سیستم در کابین ژنراتورها در SCR Room دستگاه های 31 تا 34 قرارگرفته و جهت کنترل دور ژنراتور می باشد.
توجه :
به علت قابل استفاده بودن از 2301A Speed Control جهت کنترل سرعت در تمامی موتورهای گازی ، دیزلی ، موتورهای بخار و حتی توربین ها ، لذا در تمامی این مقاله از عبارت Prime Mover ( عامل محرک ) جهت اشاره به این موتورهای تولید کننده انرژی استفاده می شود.
اخطار – حفاظت درمقابل سرعت زیاد
موتور یا سایر انواع Prime Mover ها باید مجهز به سیستم های خاموش کننده در مقابل سرعت بالا باشند تا از خرابی Prime mover و یا حتی جراحات انسانی جلوگیری به عمل آید.
جلوگیری از تخلیه الکتریسیته ساکن
تمامی تجهیزات الکترونیکی حساس به الکتریسیته ساکن بوده و بعضی تجهیزات حساس تر نسبت به بقیه هستند. برای محافظت از این تجهیزات در مقابل خرابی ناشی از الکتریسیته ساکن ، میبایست اقدام احتیاطی خاصی جهت کم کردن یا حذف کردن آن در نظر بگیرید . برای جلوگیری از این آسیب ها به نکات زیر توجه کنید:
- ( قبل از انجام اعمال تعمیراتی روی سیستم های الکترونیکی ، الکتریسیته ساکن بدنتان را بوسیله لمس کردن یک دستگیره یا یک شی فلزی ( لوله های فلزی، کابین های فلزی و …) تخلیه کنید.
- اجتناب از پوشیدن لباس هایی که از مواد مصنوعی ساخته شده است زیرا این لباس ها باعث تولید الکتریسیته ساکن در بدن میشوند. ترجیحا از لباس های نخی استفاده شود زیرا این لباسها از تولید الکتریسیته ساکن در بدن جلوگیری میکنند.
- برد اصلی این سیستم را از داخل قاب و جعبه آن خارج نکنید مگر در مواقع ضروری و اگر مجبور به خارج کردن آن شدید حتما به نکات زیر توجه فرمایید:
- پشت برد اصلی (PCB) را لمس نکنید.
- از لمس کردن کانکتورها ، سیم ها و پایه قطعات روی برد اصلی اجتناب کنید.
- جهت تعویض برد اصلی حتما برد جدید را داخل کیف های مخصوص ضد الکتریسیته ساکن نگه دارید تا زمانی که آماده برای تعویض شوند و برد قدیمی را بعد از باز کردن بلافاصله درون کیف مخصوص قرار دهید.
فصل اول : اطلاعات کلی
سیستم کنترلی در یک قالب که از ورقه فلزی ساخته شده، قرار گرفته است . این سیستم دارای یک برد الکترونیکی اصلی تک رو (Single PCB) می باشد . تمامی پتانسیومترها قابل دسترسی از طریق قسمت جلو قاب می باشند.
2301A Speed Control کنترل در مد آسنکرون را با استفاده از پتانسیومترخارجی Droop که توسط سیم به این سیستم متصل شده را می تواند فراهمکند . حالت آسنکرون برای سرعت های ثابت تا زمانی که Prime Mover قادر به تامین انرژی مورد نیاز بار باشد، استفاده می شود. همچنین این حالت برای تقسیم بار با استفاده از سنسور تعیین بار شرکت WoodWard قابل استفاده است .
پتانسیومتر خارجی Droop برای کنترل افت سرعت به عنوان تابعی از بار در زمانی که از چندین Prime Mover به صورت موازی روی یک باس مشترک جهت تولید انرژی مورد نیاز بار مورد استفاده قرارمیگیرد ، استفاده می شود.
یک Prime Mover که توسط 2301A کنترل می شود از تجهیزات زیر تشکیل شده:
- سیستم کنترل الکترونیکی 2301A .
- یک منبع تغذیه خارجی .
- یک سنسور تعیین سرعت (MPU) .
- یک Proportional Actuator جهت کنترل سوخت Prime Mover
2301A Speed Control قابل استفاده برای اکچویتورهای مستقیم و معکوس و همچنین Prime Mover های با یک یا دو اکچویتور میباشد.
رنج سرعت توسط یک دیپ سوییچ که داخل کاور یا قاب سیستم روی برد الکترونیکی اصلی میباشد، توسط کارخانه تنظیم شدهاست. رنج سرعت بر اساس فرکانس خروجی سنسور سرعت (MPU) قابل تنظیم است.
حالت معکوس :
در سیستم های با اکچویتور حالت معکوس، زمانی که جریان ارسالی توسط سیستم کنترلی به اکچویتور کاهش پیدامیکند، اکچویتور سوخت بیشتری را برای Prime Mover ارسال می کند و همچنین زمانی که سیگنال ارسالی به اکجویتور قطع شود اکچویتور حداکثر سوخت را برای Prime Mover ارسال می کند و همچنین بر عکس .
اتصالات مورد نیاز جهت اکچویتورهای معکوس دقیقا مانند اکچویتورهای حالت مستقیم میباشند. هر چند تغییراتی روی PCB برد اصلی باید داده شود تا بتوان آن را برای اکچویتورهای معکوس به کارگرفت. این تغییرات باید توسط شرکت سازنده صورت گیرد .
فصل دوم : نحوه عملکرد
مقدمه:
2310A SPEED CONTROL مقدار سرعت موتور یا Prime Mover را بررسی کرده و آن را در یک سطح پایدار عملکرد نگاه می دارد . این سیستم توسط یک سنسور تشخیص بار ، توانایی تقسیم بار با ژنراتورهای دیگر روی یک باس مشترک را دارا می باشد .
کنترل سرعت
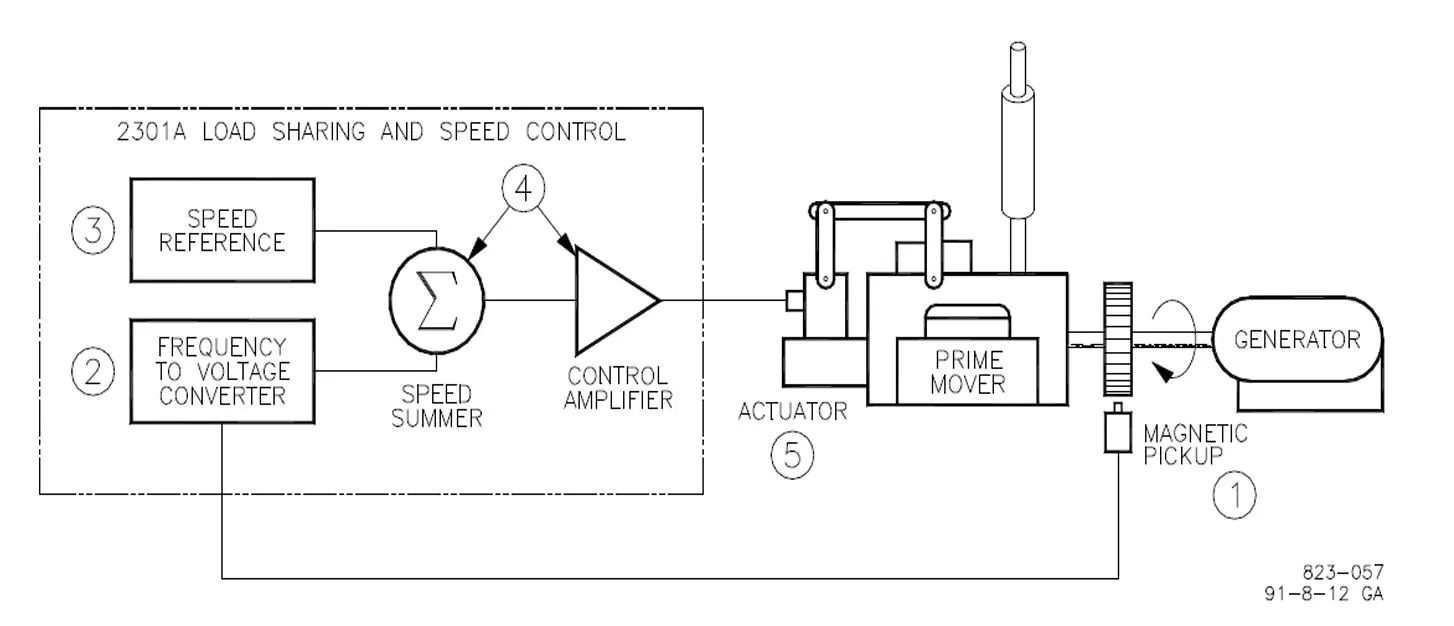
در شکل بالا یک سیستم کنترلی که شامل:
- مگنتیک پیکاپ : یک سنسور تشخیص سرعت برای موتور MPU
- Ferquency To Voltage Convertor : یک مبدل فرکانس به ولتاژ ، جهت تبدیل فرکانس سرعت ارسال شده توسط MPU به ولتاژ برای استفاده در مدارهای داخلی 2301A
- Speed Refrence : یک رفرنس یا مرجع سرعت برای مقایسه با سرعت موتور یا Prime Mover ( رفرنس سرعت برای حالت های RATED و IDLE درون 2301A مهیا بوده و توسط کلید خارجی که در دسترس کاربر می باشد ، قابل تغییر است.)
- Speed Summer وControl Amplifier : یک قسمت جمع کننده و تقویت کننده با خروجی متغیر (Proportional) برای اک]ویتور جهت تامین سوخت مورد نیاز موتور یا Prime Mover در بارهای مختلف.
- Actuator : قسمت اک]ویتور جهت تامین و تنظیم سوخت موتور.
سنسور سرعت MPU یک سیگنال متناوب با فرکانس متغیر متناسب با سرعت موتور مهیا می کند . در مرحله بعد واحد مبدل فرکانس به ولتاژ سیگنال ارسالی از سنسور را دریافت کرده و آن را به ولتاژ DC قابل تغییر تبدیل میکند . واحد رفرنس سرعت ( Speed Refrence ) یک ولتاژ DC متناسب با وضعیت IDLE و یا RATED برای مقایسه با سیگنال سرعت فراهم می کند. در قسمت Speed Summer ولتاژ سیگنال سرعت و رفرنس سرعت با یکدیگر مقایسه می شود و در واحد Control amplifier تقویت می گردد . حال اگر ولتاژ سیگنال سرعت کوچکتر یا بزرگتر از ولتاژ رفرنس سرعت باشد ، یک سیگنال جهت کم یا زیاد کردن سرعت به موتور ارسال می گردد.
اکچویتور نیز از این سیگنال دستور گرفته و مقدار دریچه سوخت را کنترل و تنظیم مینماید تا زمانی که ولتاژ سیگنال سرعت و ولتاژ رفرنس سرعت با هم برابر گردند.
ورودی های کمکی
ترمینال های 33 تا 31 جهت ورودی های کمکی استفاده می شوند که این ورودی ها روی ولتاژ رفرنس تاثیرگذار هستند . این ورودی ها شامل پتانسیومترDROOP ، SPEED TRIM ، SPM synchronizer ، و ورودی کمکی که معمولا به سنسور بار متصل می شود.
واحد Failed Speed Signal
این واحد مستقیما با سنسور سرعت MPU در ارتباط است . زمانی که سیگنال سرعت ارسالی از سنسور قطع گردد ، سیستم حداقل سیگنال سوخت را ارسال می کند . این حداقل سیگنال سوخت سبب می شود اکچویتور حداقل سوخت را برای موتور فراهم کند.
سیگنال حداقل سوخت برای کنترل اکچویتورهای 22 تا 362 میلی آمپر:
- جریان اکچویتور کمتر از 32 میلی آمپر برای اکچویتورهای حالت مستقیم.
- جریان اکچویتور بزرگتر از 382 میلی آمپر برای اکچویتورهای حالت معکوس.
سیگنال حداقل سوخت برای کنترل اکچویتورهای 32 تا 122 میلی آمپر:
- جریان اکچویتور کمتر از 22 میلی آپر برای اکچویتورهای حالت مستقیم.
- جریان اکچویتور بزرگتر از 162 میلی آمپر برای اکچویتورهای حالت معکوس.
کلید خارجی Failed Speed Signal قابل اتصال به ترمینال 3 و پایه دیگر آن به ترمینال 2 برای 2301A با ولتاژ تغذیه 32 تا 40Vdc و ترمینال 6 برای 2301A با ولتاژ تغذیه 120 Vac قابل اتصال می باشد . جهت استارت اولیه موتور برای ارسال حداقل سیگنال سوخت به اکچویتور این کلید باید به صورت موقت بسته باشد.
به منظور عملکرد پایدار و بهینه برای هر سیستمی باید تنظیمات پتانسیومترها صورت گیرد. برای تنظیمات ، این پتانسیومترها از جلو قابل دسترس می باشند . در شکل زیر نمایی از این پتانسیومترها را مشاهده می کنید.
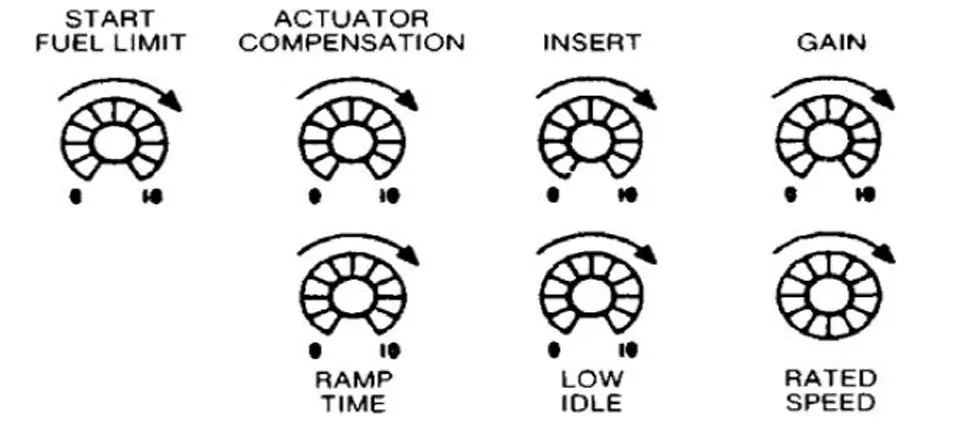
- پتانسیومتر RATED SPEED روی قسمت مبدل سرعت (CONVERTOR SPEED) تاثیر گذاشته و در حالت پایدار عملکرد با ولتاژ رفرنس سرعت برابر است.
- پتانسیومتر LOW IDLE تاثیر گذار روی قسمت رفرنس سرعت Speed Refrence می باشد و برای حالت IDLE به کار میرود.
- پتانسیومتر START FUEL LIMIT جهت تنظیم اکچویتور برای ارسال سوخت به موتور در لحظه استارت می باشد.
- پتانسیومترهای RESET و GAIN و ACTUATOR COMPENSATION روی مقادیر Control Amplifier تاثیر گذارند به منظور وفق گرفتن با انواع Prime Moverها . تنظیمات RESET روی زمان عکس العمل برگشتی بعد از بار اثر گذار است . حجم تغییرات سرعت در اثر تغییرات ناگهانی بار توسط پتانسیومتر GAIN قابل تنظیم و تغییر میباشد. پتانسیومتر ACTUATOR COMPENSATION برای جبران مقدار زمانی است که طول میکشد تا اکچویتور و موتور به سیگنال ارسالی عکس العمل نشان دهند.
- پتانسیومتر RAMP TIME به منظور تنظیم زمان شتاب گرفتن موتور از حالت IDLE به حالت RATED می باشد.
حفاظت مدار اکچویتور:
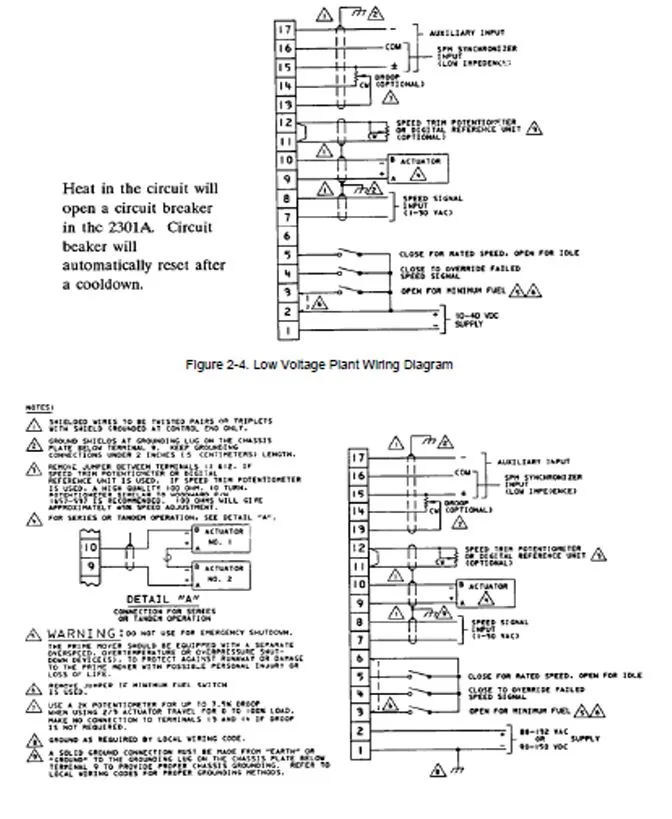
سیستم کنترلی 2301A در مقابل اتصال کوتاه و جریان زیاد در قسمت مدار اکچویتور روی ترمینال های 9 و 32 توسط یک بریکر اتوماتیک ، محافظت شده میباشد. بعد از برداشته شدن اتصال کوتاه از این پایه ها این بریکر به صورت اتوماتیک ریست شده و بعد مدتی دوباره به مدار باز می گردد .
فصل سوم : نصب
این فصل شامل اطلاعات کلی جهت نصب 2301A Speed Control از جمله منبع تغذیه مورد نیاز ، ملاحظات محیطی و همچنین بررسی مکان نصب جهت انتخاب بهترین مکان برای نصب می باشد. نکات اضافی شامل دستورات باز کردن کاور ، اتصالات الکتریکی و مرحله چک کردن نهایی می باشد.
باز کردن کاور سیستم :
قبل از بازکردن کاور ، بخش جلوگیری از تخلیه الکتریسیته ساکن با دقت مورد مطالعه قرار گیرد . سیستم را از لحاظ ظاهری چک کنید که فاقد تورفتگی یا خمیدگی یا خش روی برد اصلی یا خرابی ترمینال ها باشد.
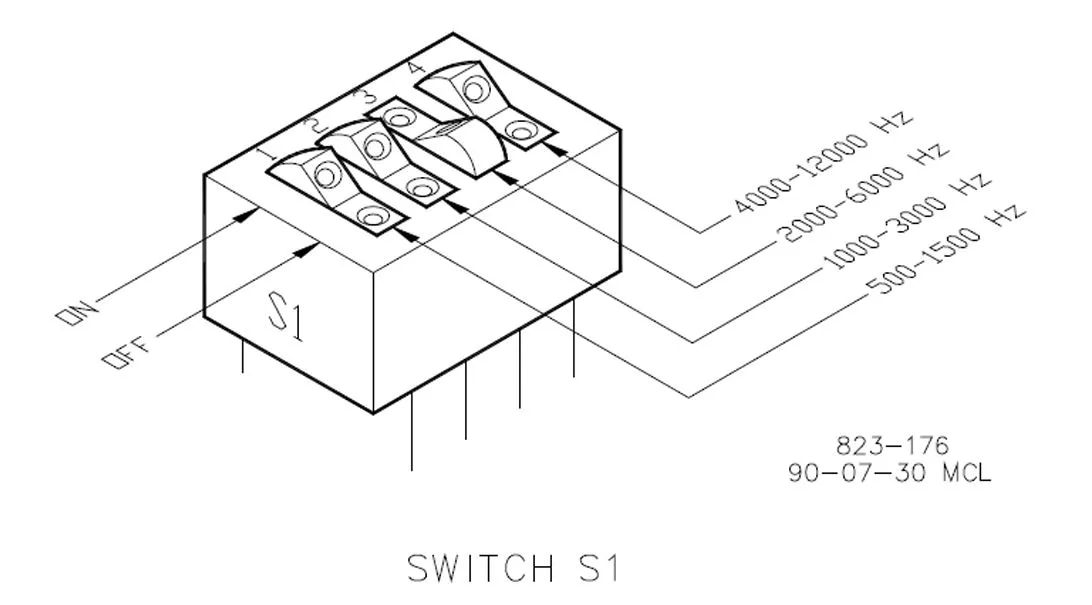
انتخاب رنج سرعت :
یک دیپ سوییچ چهار کاناله در سمت چپ قسمت پایین داخل قاب روی برد اصلی قرار گرفته است . این سوییچ جهت تنظیم رنج سرعت که بر اساس سیگنال دریافتی از سنسور سرعت (MPU) می باشد، طراحی شده است . سرعت با فرکانس خروجی سنسور رابطه داشته و متناسب با تعداد دور موتور میباشد. سوییچ شماره 1 توسط کارخانه سازنده به صورت پیش فرض روی حالت روشن قرارگرفته که بیانگر فرکانس سنسور 2222 تا 6222 هرتز می باشد. کلید شماره یک برای فرکانس سنسور 022 تا 3022 هرتز ، کلید شماره دو برای فرکانس سنسور 3222 تا 1222 هرتز و کلید شماره چهار برای فرکانس 3222 تا 32222 هرتز طراحی شده است . باید توجه داشت که فقط یک کلید می تواند روی حالت روشن باشد و بقیه کلیدها باید روی حالت خاموش تنظیم شوند .
منبع تغذیه مورد نیاز :
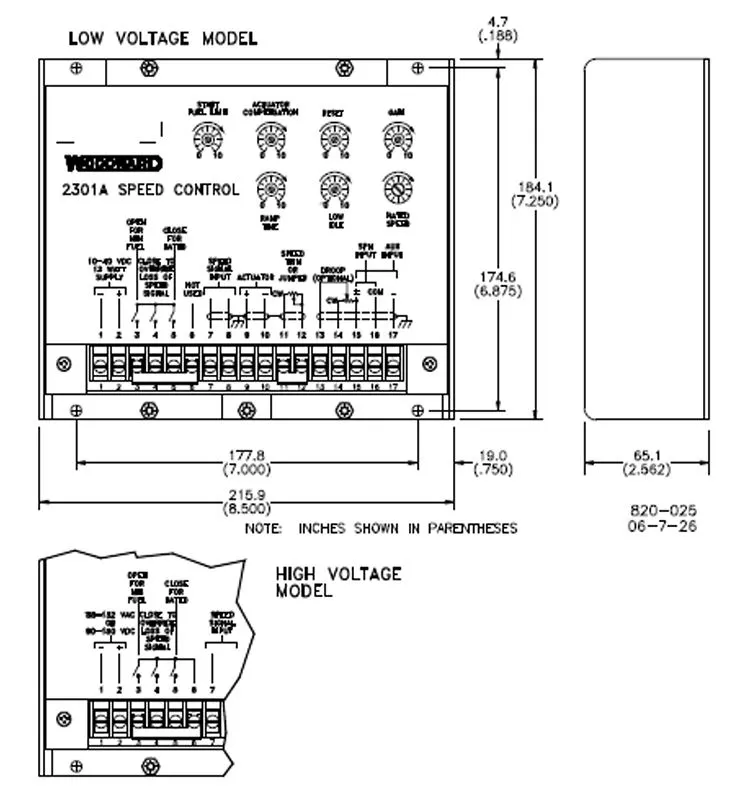
2301A در دو مدل Low Voltage و High Voltage ساخته شده است. مدل Low Voltage نیازمند یم منبع تغذیه 10 تا 40 ولت DC میباشد. مدل High Voltage نیازمند یک منبع تغذیه 88 تا 120 ولت AC میباشد. منبع تغذیه AC میتواند بین 50 تا 400 هرتز باشد.
منبع تغدیه مورد نیاز باید خروجی آن دارای کمترین مقاومت باشد (Low Impedance) برای مثال مستقیما از یک باتری . از اتصال مدل Low Voltage به یک منبع تغدیه با ولتاژ بالا و استفاده از مقاومت و دیود زنر جهت پایین آوردن ولتاژ این منبع تغذیه خودداری کنید . 2301A دارای منبع تغذیه سوئیچینگ داخلی بوده از این رو منبع تغذیه ورودی باید دارای جریان دهی مناسبی باشد. اگر از باتری جهت تغذیه ورودی استفاده شود باید یک شارژر باتری مناسب، جهت شارژ مناسب و پایدار برای باتری استفاده شود .
توجه – آسیب احتمالی به سیستم کنترلی
اگر جهت تغذیه سیستم کنترلی از باتری وشارژر باتری استفاده می شود ، جهت جلوگیری از آسیب به سیستم کنترلی قبل از جدا کردن باتری از سیستم کنترلی ، از جدا بودن شارژر آن نیز اطمینان حاصل نمایید.(شارژر نباید به صورت مستقیم به سیستم کنترلی متصل باشد.)
نکات مورد توجه جهت انتخاب مکان مناسب برای نصب:
توجه به نکات زیر جهت انتخاب مکان مناسب ضروری است.
- تهویه مناسب جهت خنک نگاه داشتن
- فضای خالی کافی جهت تعمیرات یا جایگزینی
- محافظت و جلوگیری از در معرض قرار گرفتن با آب
- محافظت در مقابل قطعات ولتاژ بالا و جریان بالا به دلیل تولید امواج الکترومغناطیسی و تداخل این امواج با سیستم 2301A .
- محافظت در مقابل لرزش های زیاد .
- محدوده دمای کاری بین C ˚85~40-.
از نصب کردن 2301A بر روی موتور جدا خودداری کنید.
سیم های شیلددار
تمام کابل های ارتباطی در برگیرنده سیگنال ها باید به صورت دو به دو دارای شیلد بافته شده باشند تا در مقابل سیگنال های الکترومغناطیسی سرگردان ناشی از تجهیزات مجاور محافظت شده باشند. تمامی شیلدها به پایه Ground که در زیر ترمینال شماره 9 قرار دارد باید متصل شوند . طول شیلدها نباید از ”2 (5 cm) تجاوز کند.
سیم های حاوی سیگنال در قسمتی که از شیلد خود جدا می شوند حتی المقدور کوتاه انتخاب شوند و از ”6 تجاوز نکنند . در سمت دیگر کابلهای سیگنال (سمت موتور یا Prime Mover)، شیلد باید ایزوله از سیمهای حاوی سیگنال باشد و به جایی متصل نگردد . شکل زیر چگونگی آماده سازی این اتصالات را بیان می کند .
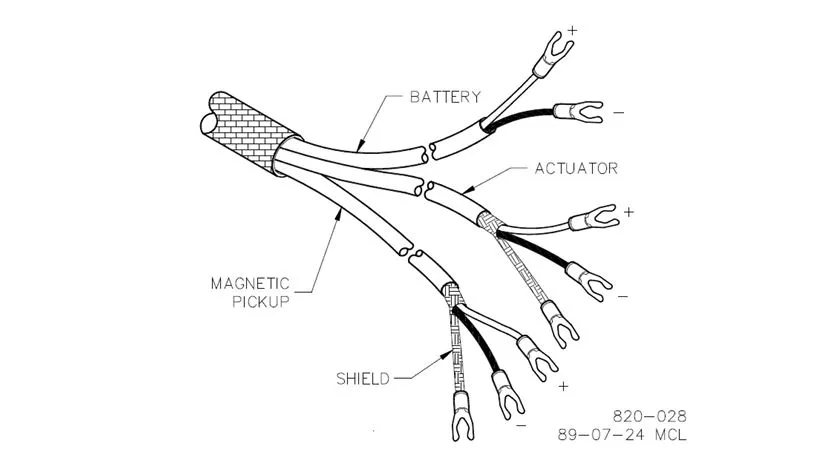
از سر سیم های مناسب جهت اتصال سیم ها به ترمینال ها استفاده کنید . سر سیم شماره 6 جهت اتصال به بیشتر ترمینال ها مناسب میباشد.
تنظیمات خارجی
پتانسیومتر Speed Trim
یک پتانسیومتر و یا یک واحد مرجع دیجیتالی جهت تنظیمات دقیق سرعت قابل اتصال به پایه های 33 و 32 می باشد .استفاده از پتانسیومتر با کیفیت بالا ، 322 اهم 32 دور ( و یا پارت -1657537 شرکت WoodWard و یا مشابه آن ) جهت تنظیمات دقیق (%5-+) سرعت بسیار مناسب است . اگر از پتانسیومتر و یا واحد مرجع دیجیتال استفاده نشد باید ترمینالهای 33 و 32 اتصال کوتاه شوند . 2301A Speed Control به صورت پیش فرض در درون کارخانه اتصال کوتاه شده و برای استفاده از پتانسیومتر خارجی باید این اتصال کوتاه را حذف کرد.
پتانسیومتر Droop
جهت فراهم کردن ماکزیمم Droop %8 یک پتانسیومتر 2 کیلو اهم می تواند متصل شود . از منظر روبه رو که به پتانسیومتر نگاه شود ، پایه سمت چپ به ترمینال 15 ، پایه سمت راست به ترمینال 14 و پایه وسط به ترمینال 13. اگر از پتانسیومتر Droop استفاده نشد ترمینالهای 13 و 14 باید باز بمانند.
کلیدهای اختیاری
اتصال کلید حداقل وسخت Minimum Fuel Contact
اتصال کلید حداقل سوخت بین ترمینالهای شماره 2 و 3 در مدل Low Voltage و ترمینالهای شماره 3 و 6 در مدل High Voltage میسر می باشد . این حالت برای خاموش کردن نرمال Prime Mover استفاده می شود . اتصال این کلید در نقشه اتصالات مشخص شده است . در صورت استفاده نکردن از این حالت ، ترمینالهای مربوطه باید به صورت ثابت اتصال کوتاه شوند.
کلید Failed Speed Signal
مدار کنترلی 2301A Speed Control به صورت ثابت سیگنال ارسالی از سنسور سرعت (MPU) را دنبال می کند . اگر این سیگنال از حد آستانه خود کمتر باشد 2301A حداقل سیگنال کنترلی را جهت اکجویتور ارسال می کند ( ماکزیمم سیگنال کنترلی جهت اکجویتور های حالت معکوس ) نحوه اتصال این کلید در نقشه اتصالات مشخص شده است.
قبل از شروع به کار Prime Mover سیگنال سرعت وجود ندارد به همین دلیل قسمت مخدوش بودن سیگنال سرعت(Failed Speed Signal) در 2301A فعال می شود. سرعت محور میل لنگ معمولا برای فراهم کردن سیگنال سرعت کافیست . بنابراین کلید مربوط به مخدوش بودن سیگنال سرعت(کلیدFailed Speed Signal) را فعال کنید که معمولا برای این موتورها نیاز نیست. در بعضی از سیستم های بخاری همراه با توربین این کلید مورد استفاده قرار گرفته و باید در لحظه استارت بسته شود تا حداقل سیگنال کنترلی جهت اکچویتور برای تامین سوخت ارسال گردد.
کلید Idle/Rated
اتصال یک کلید تک حالته به ترمینال شماره 5 به صورتی که در نقشه اتصالات می بینید برای حالت Idle / Rated . بسته شدن کلید برای حالت Rated و باز بودن آن برای حالت Idle . معمولا از فشار روغن جهت بستن این کلید می توان استفاده کرد . زمانی که کلید بسته می شود ولتاژ 10~40 VDC به ترمینال 5 منتقل می شود و Prime Mover شروع به بالا بردن سرعت از حالت Idle به Rated می کند. زمانی که این کلید باز شود ولتاژ از روی ترمینال شماره 5 برداشته شده و Prime Mover شروع به کاهش سرعت از حالت Rated به حالت Idle می کند . نرخ تغییر سرعتPrime Mover فقط در حالت شتاب گرفتن ( از حالت Idle به حالت Rated ) به کار برده می شود . زمانی که پتانسیومتر Ramp Time در حالت ماکزیمم خود ( کامل به سمت عقربه های ساعت ) باشد نرخ تغییر سرعت از Idle به حالت Rated ، 4-22+ ثانیه می باشد .
اگر مقدار پتانسیومتر Ramp Time روی حداقل ( کاملا به طرف عکس عقربه های ساعت ) مقدار خود باشد ، نرخ تغییر سرعت از Idle به حالت Rated کمتر از یک ثانیه خواهد بود.
نرخ تغییر سرعت از حالت Rated به حالت Idle حدود یک ثانیه است و این زمان به مقدار پتانسیومتر Ramp Time وابسته نیست .
سیم های اتصالی اکچویتور به ترمینالهای شماره 9 (+) و 10 (-) متصل می شود. استفاده از سیم های شیلددار بسیار مناسب می تواند باشد . شیلد در تمامی طول مسیر کابل باید وجود داشته و از سایر رساناها ایزوله باشد.
در بعضی موارد 2301A برای راه اندازی دو Prime Mover استفاده می شود که بدین منظور باید دو اکچویتور به سیستم2301A متصل گردند (در نقشه اتصالات مشاهده می شود). در استفاده از دو Prime Mover و یک 2301A باید هر دو موتور کاملا شبیه بوده و پاسخ های مشابهی به جریانهای ارسالی برای هر اکچویتور داشته باشند .
ترمینالهای شماره 17 ( – ) و 15( + ) به عنوان ورودی کمکی و اتصال به سنسور بار متصل می شوند . استفاده از سنسور تشخیص بار به 2301A اجازه کار کردن در مد آسنکرون جهت تقسیم بار را می دهد . اگر از سنسور تشخیص بار استفاده نشود باید از حالت Droop جهت تقسیم بار استفاده کرد.
استفاده از یک سنسور تشخیص سرعت (معمولا سنسور magnetinc pick up ( MPU ) استفاده می شود ) جهت اتصال به ترمینالهای 8 و 7 استفاده می شود . پلاریته در نصب این سنسور مهم نیست . استفاده از سیمهای شیلد دار می تواند بسیار مناسب باشد.
زمانی که عملیات نصب به صورت کامل انجام شد ، انجام بررسی های زیر قبل استارت اولیه سیستم ضروری می باشد:
- چک کردن اتصالات بین اکچویتور و Prime Mover جهت اطمینان از عدم وجود نشتی یا شل بودن اتصالات .
- چک کردن اتصالات و سیم ها مطابق با نقشه اتصالات مربوطه .
- چک کردن ترمینال ها و اطمینان از سالم بودن آنها .
- بررسی سنسور سرعت (MPU) از نظر ظاهری و چک کردن فاصله هوایی بین سنسور و چرخ دنده موتور و تنظیم آن در صورت لزوم .
- چک کردن Ground ها و شیلدها .
نمای بیرونی 2301A Speed Control
نقشه اتصالات
فصل چهارم : راه اندازی و تنظیمات
تنظیمات اولیه پتانسیومترها قبل از استارت
- پتانسیومتر RATED SPEED روی حداقل مقدار خود تنظیم شود ( این پتانسیومتر از نوع پتانسیومترهای ده دور بوده و کامل در جهت عکس حرکت عقربه های ساعت تنظیم شود) در صورتی که از پتانسیومتر خارجی Speed Trim استفاده شده است در حالت وسط قرار گیرد.
- پتانسیومتر RESET روی حالت وسط قرار گیرد ( این پتانسیومتر از نوع پتانسیومتر تک دور می باشد)
- پتانسیومتر GAIN روی حالت وسط قرار گیرد (این پتانسیومتر از نوع پتانسیومتر تک دور می باشد).
- پتانسیومتر RAMP TIME روی حداقل مقدار خود تنظیم شود (کامل در جهت عکس عقربه های ساعت قرار گیرد) این پتانسیومتر از نوع تک دور می باشد.
- پتانسیومتر LOW IDLE SPEED روی حداقل مقدار خود تنظیم شود ( کامل در جهت عکس عقربه های ساعت قرار گیرد . این پتانسیومتر از نوع تک دور می باشد)
- پتانسیومتر خارجی DROOP ، در صورت استفاده از این پتانسیومتر روی حداقل مقدار خود تنظیم گردد ( کامل در جهت عکس عقربه های ساعت قرار گیرد . این پتانسیومتر از نوع تک دور می باشد)
- پتانسیومتر ACTUATOR COMPENSATION در موتورهای دیزلی انژکتوری این پتانسیومتر روی خط دوم از 32 خط مشخص شده ی دور پتانسیومتر ، تنظیم میشود (این پتانسیومتر از نوع تک دور می باشد)
- پتانسیومتر START FUEL LIMIT روی حداکثر مقدار خود قرار گیرد ( کامل در جهت عقربه های ساعت)
مطمئن گردید اتصالات اکجویتور به ترمینالهای 9 (+) و 10(-) متصل شده باشند.
تنظیمات جهت عملکرد پایدار
از پتانسیومتر RATED SPEED جهت تنظیم دور استفاده می شود. در صورتی که عملکرد موتور دارای پایداری مناسبی می باشد با استفاده از این پتانسیومتر دور موتور را روی مقدار دلخواه تنظیم کنید.
اگر موتور یا Prime Mover بر روی سرعت های بالا گیر کرده و با تغییرات پتانسیومتر RATED SPEED مقدار سرعت به سمت سرعت های پایین نمی آید مقدار پتانسیومتر GAIN را کاهش دهید ( در جهت عکس عقربه های ساعت ) تا جایی که به عملکرد پایدار دست یابید . توجه داشته باشید که با تغییر مقدار کمی از پتانسیومتر GAIN تغییرات لحظه ای سرعتی زیای در موتور ایجاد خواهد شد.
اگر موتور روی سرعت های پایین گیر کرده و تغییرات پتانسیومتر RATED SPEED تاثیر زیادی روی سرعت موتور ندارد ، پتانسیومتر RESET را به آرامی افزایش دهید (در جهت عقربه های ساعت) تا عملکرد پایدار به دست آید . اگر با افزایش پتانسیومتر RESET پایداری مورد نظر به دست نیامد ، می توان یکی از مراحل زیر را طی کرد:
- کاهش مقدار پتانسیومتر GAIN ( در جهت عکس عقربه های ساعت ) یا کاهش مقدار پتانسیومتر GAIN و افزایش مقدار پتانسیومتر ACTUATOR COMPENSATION .
تنظیمات دینامیکی
تنظیمات پتانسیومترهای GAIN و RESET جهت به دست آوردن پاسخ مناسب موتور در برابر بار می باشد . افزایش مقدار پتانسیومتر GAINباعث جوابهای سریع می شود .(کاهش تغییرات سرعت در مقابل تغییرات ناگهانی بار) . برای بدست آوردن جواب مناسب به آرامی مقدار GAIN را افزایش دهید تا جایی که موتور وارد یک حالت ناپایدار شود ، حال یک مقدار پتانسیومتر را برگردانید که مجددا موتور وارد حالت پایدار گردد . حال با اتصال بار از عدم تغییرات زیاد سرعت موتور در مقابل بار ناگهانی و عدم خارج شدن از حد سرعت آن اطمینان حاصل کنید. برای جلوگیری از خارج شدن از حد معمول می توان مقدار پتانسیومتر RESET را کمی افزایش داد .اگر مقدار پتانسیومتر RESET روی مقادیر حداقل خود قرار دارد (بین 2 تا 1) ، جهت پایداری مناسب تر می توان مقدار آن را افزایش داد و در صورت لزوم از مقدار GAIN کم کرد .
اگر موتور در زمان برگشتن بعد از بار به حالات مناسب ، دارای سرعت کمی است می توان مقدار پتانسیومتر RESET را کاهش داد ( در جهت عکس عقربه های ساعت ).
منحنی های زیر ، موتور را بعد از استارت با حداقل مقدار پتانسیومتر RAMP TIME ، در تنظیمات مختلف پتانسیومترهای GAIN و RESET در یک حالت پایدار کارکرد ، بر روی موتورهای دیزلی ، نمایش داده شده است.
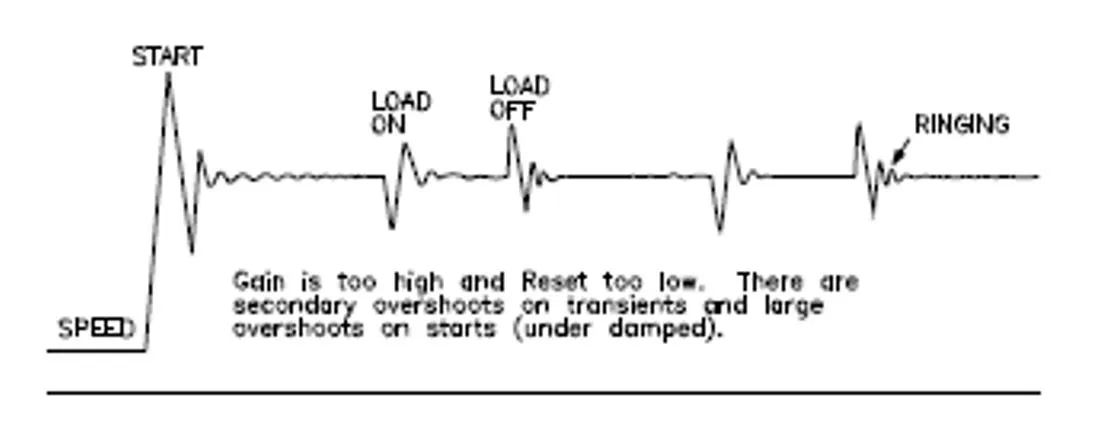
مقدار پتانسیومتر GAIN زیاد و پتانسیومتر RESET کم تنظیم شده است
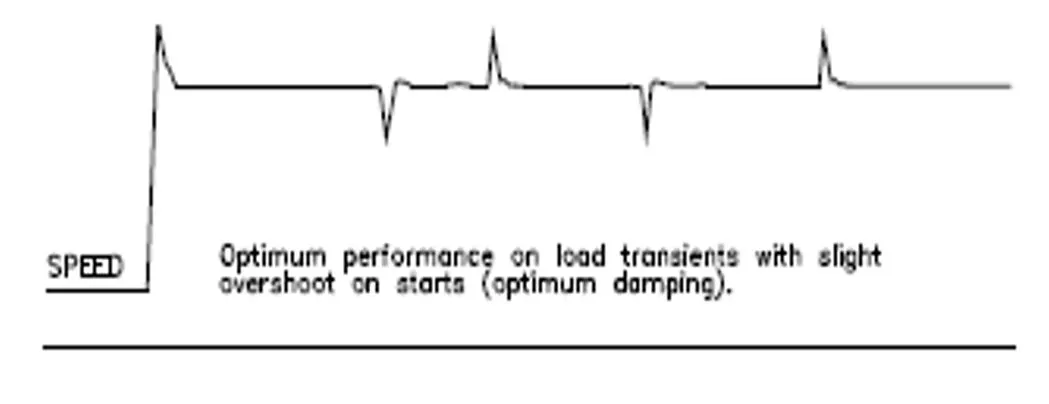
کارکرد بهینه با بار گذرا همراه با کمی خارج شدن از حد سرعت در لحظه استارت
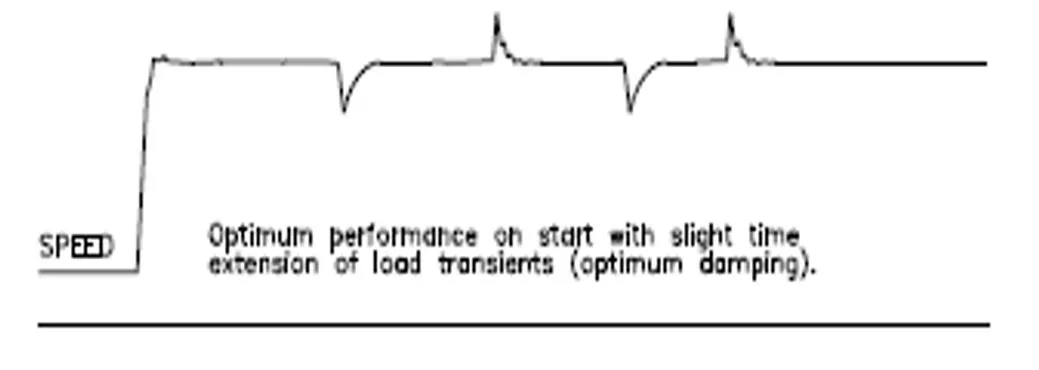
کارکرد بهینه در لحظه استارت همراه با برگشت زمان گیر در بارهای گذرا
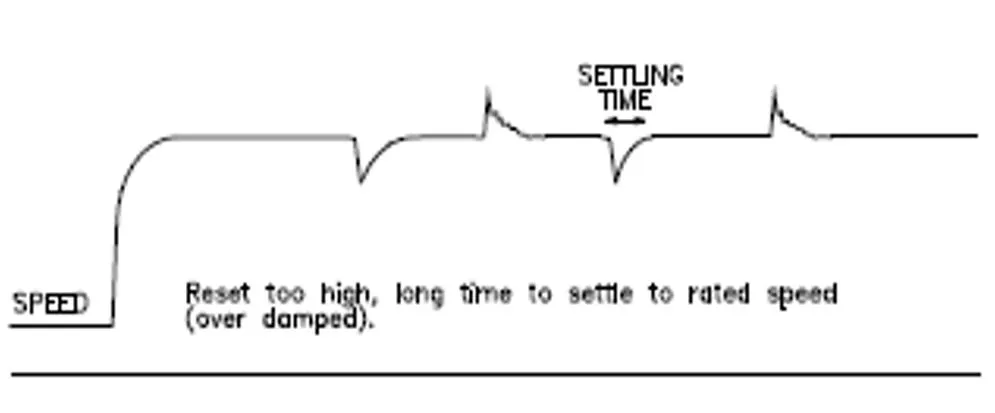
پتانسیومتر RESET روی مقدار زیاد تنظیم شده ، زمان زیاد در حالت برگشت به سرعت مناسب
باید توجه داشت که حالت کار پایدار صرفا با افزایش مقدار پتانسیومتر GAIN به دست نخواهد آمد . در بعضی موارد باید مقدار این پتانسیومتر را کاهش داد تا در حالت های مختلف بار عملکرد مناسبی از موتور به دست آید.
تنظیم پتانسیومتر ACTUATOR COMPENSATION
اگر این پتانسیومتر طبق توضیحات بخش (تنظیمات اولیه پتانسیومترها قبل از استارت) تنظیم شده باشد ، دیگر نیازی به تنظیمات مجدد ندارد مگر در زمان هایی که موتور در دوره های زمانی وارد یک حالت ناپایدار گردد می توان مقدار این پتانسیومتر را افزایش داد و مجدد مقدار پتانسیومترهای GAIN و RESET را تنظیم کرد تا حالت پایداری از عملکرد به دست آید.
اگر در زمان تنظیم این پتانسیومتر عملکرد ناپایدار و سریعی از اکجویتور یا موتور مشاهده شد ، مقدار این پتانسیومتر را به آرامی کاهش دهید.
تنظیم پتانسیومتر LOW IDLE SPEED
ممکن است در زمانی تنظیم این پتانسیومتر سیستم در حالت سرعت RATED باشد . مقدار این پتانسیومتر را افزایش دهید ( کامل در جهت عقربه های ساعت ) . حال برای تنظیم این پتانسیومتر کلید خارجی CLOSE FOR RATED (کلید تعیین حالت IDLE و RATED ) را باز نمایید تا موتور وارد سرعت IDLE گردد.
اکنون به آرامی مقدار این پتانسیومتر را کاهش دهید (در جهت عکس عقربه های ساعت) تا سرعت IDLE مورد نظر به دست آید.
اگر زمانی مجبور به تغییر مقدار پتانسیومتر RATED SPEED شدید ، قطعا مقدار سرعت IDLE نیز تغییر خواهد کرد که نیاز به تنظیم مجدد دارد . ولی تغییرات پتانسیومتر LOW IDLE SPEED تاثیری روی تنظیمات RATED SPEED نخواهد داشت.
تنظیم پتانسیومتر RAMP TIME
تنظیم این پتانسیومتر در جهت به دست آوردن مقدار مناسب زمان شتاب از حالت IDLE به حالت RATED با حداقل مقدار Overshoot می باشد . با تنظیم این پتانسیومتر می توان زمان شتاب موتور را بین 1 تا 22 ثانیه تنظیم کرد.
نرخ تغییر سرعت از حالت Rated به حالت Idle حدود یک ثانیه است و این زمان به مقدار پتانسیومتر Ramp Time وابسته نیست.
تنظیم پتانسیومتر START FUEL LIMIT
در زمانی که موتور روشن و در حالت سرعت RATED و بدون بار قرار دارد ، با استفاده از یک ولتمتر ولتاژ ترمینالهای اکچویتور 9 (+) و 32 (-) را ثبت نمایید . حال موتور یا Prime Mover را خاموش کرده و کلید خارجی Failed Speed Signal را ببندید تا قسمت داخلی Failed Speed Signal Override فعال شود. اکنون ولتاژ خروجی سیستم که برای اکجویتور ارسال می شود توسط پتانسیومتر START FUEL LIMIT قابل تنظیم است . حال با تغییر این پتانسیومتر ولتاژ اکجویتور را حدودا 30 درصد بالاتر از مقدار ولتاژ خوانده شده در حالت RATED تنظیم کنید یا در اکجویتورهای حالت معکوس ، این ولتاژ را حدودا 30 درصد کمتر از ولتاژ به دست آمده در حالت RATED تنظیم کنید . حال در صورتی که موتور شما نیاز به کلید خارجی Failed Speed Signal ندارد آن را باز نمایید و موتور را استارت کنید.
موتور را استارت کرده و زمان استارت ، مقدار ناپایداری سرعت و دود اگزوز را بررسی نمایید. اگر موتور روشن نمی شود ، پتانسیومتر START FUEL LIMIT را به آرامی افزایش دهید تا موتور روشن گردد. می توان گفت مقدار این پتانسیومتر روی حالت مناسب تنظیم گردیده است.
باید توجه داشت قسمت START FUEL LIMIT با چرخاندن کامل این پتانسیومتر در جهت عقربه های ساعت غیر فعال خواهد شد.
تنظیم پتانسیومتر DROOP
این پتانسیومتر از نوع پتانسیومترهای اختیاری می باشد . منظور از DROOP در زمانی است که بار به سیستم اعمال شده و سرعت موتور یا Prime Mover مقداری کاهش یافته و مجددا به حالت اولیه باز می گردد . در خیلی از موارد نیازی به جبران این افت سرعت توسط این پتانسیومتر (پتانسیومتر DROOP) نمی باشد و فقط این پتانسیومتر در حالت وسط تنظیم گردیده و این افت سرعت را توسط پتانسیومترهای دیگر، (RESE GAIN ، RATED SPEED … ) جبران می کنیم.
حال اگر چندین موتور یا Prime Mover به صورت موازی (Parallel) روی یک باس مشترک در حال کار باشند، دیگر تغییرات سرعت که سبب تغییرات فرکانس می شود جایز نیست مگر اینکه از یک ماژول تشخیص بار استفاده گردد . در این حالت پتانسیومتر DROOP در حالت وسط قرار گرفته و توسط پتانسیومتر RATED SPEED مقدار سرعت روی بار را تنظیم می کنیم.
توجه داشته باشید که اگر مقدار این پتانسیومتر خیلی زیاد تنظیم گردد در زمان برداشته شدن بار از روی موتور ، ماندگاری موتور روی سرعت بالا زیاد است . همچنین با تنظیم این پتانسیومتر روی مقادیر بالا ، موتور یا Prime Mover کند و تنبل گردیده و در بار های مختلف جواب و عکس العمل خوبی نخواهد داشت . تنظیم این پتانسیومتر روی مقدار کم نیز سبب ناپایداری شبیه تنظیمات نامناسب پتانسیومترهای GAIN و RESET در موتور خواهد شد.
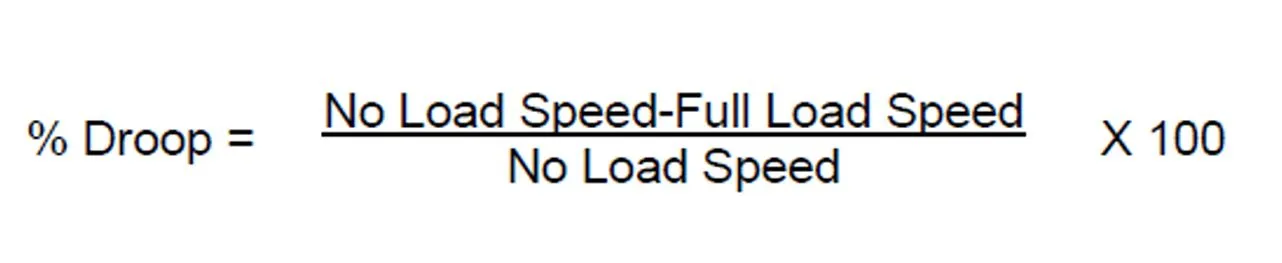
واحد هایی که با چندین Prime Mover یا موتور کار می کنند ولی دارای باس های مجزا و غیر مشترک هستند اغلب نیازمند به تنظیم این پتانسیومتر روی یک سطح خاص می باشند تا از افت سرعت در برابر بارهای مختلف جلوگیری به عمل آید . در این واحدها مقدار DROOP بر اساس در صد بیان شده و توسط فرمول زیر قابل محاسبه می باشد:
برای تنظیم مقدار خاصی از DROOP در این واحدها مراحل زیر را طی می کنیم :
- مقدار پتانسیومتر DROOP روی حالت وسط تنظیم می شود ( پتانسیومتر 2KΩ، اتصال به ترمینال های 14 که به پایه سمت راست پتانسیومتر متصل می شود، ترمینال 13 که به پایه وسط پتانسیومتر متصل می شود و ترمینال 15 که به پایه سمت چپ پتانسیومتر متصل می شود.)
- موتور را استارت کرده ومقدار پتانسیومتر RATED SPEED را برای سرعت Rated در حالت بدون بار تنظیم می کنیم.
- بار کامل را به Prime Mover اعمال می کنیم.
- حال مقدار پتانسیومترDROOP را تنظیم کرده تا به سرعت مناسب برسیم.
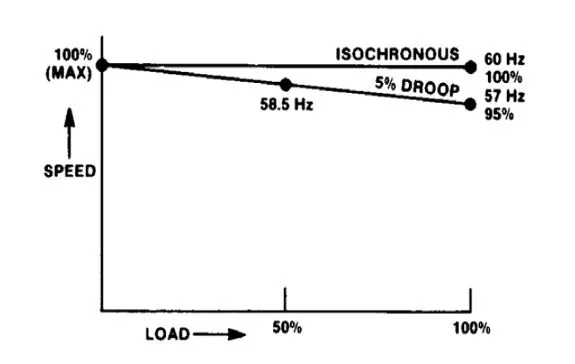
- بار را برداشته و مراحل 2 تا 4 را تکرار می کنیم تا زمانی که فرکانس کاری در زمان برداشت بار به 60 هرتز برسد.