
اتوماسیون صنعتی, مقالات
درایو موتورهای القایی

بهمن
در این مقاله قصد داریم در مورد درایو موتورهایالقایی، راهاندازی، کنترل سرعت و ترمز آن صحبت کنیم.
فهرست مطالب
- 1- مقدمه
- 2- راهاندازی موتورهایالقایی
- 3- ترمز موتورهایالقایی
- 4- کنترل سرعت موتورهایالقایی
1- مقدمه
قبل از بحث درایو موتورهایالقایی ، مهم است که از موتورهایالقایی آگاهی داشته باشید.
با کلمات بسیار ساده موتورهایالقایی را میتوان به عنوان موتورهای AC با سرعت ثابت سه فاز توصیف کرد.
دلیل توصیف موتورهایالقایی به عنوان سرعت ثابت به این دلیلاست که معمولاً این موتورها بسته به فرکانس منبع و تعداد سیم پیچ ها دارای سرعت ثابت هستند.
در گذشته امکان کنترل سرعت موتورهایالقایی مطابق نیاز شخصی امکان پذیر نبود. به همین دلیل استفاده از آنها محدود بود و با
وجود مزایای بسیاری دیگر نسبت به موتورهای DC، به عدم قابلیت کنترل دور قابل استفاده نبودند.
به دلیل در دسترس بودن تریستورها یا SCR ها، ترانزیستورهای، IGBT و GTO درایوهای موتورالقایی جهت توسعه تغییر سرعت موتورها ساخته شده اند.
گرچه هزینه این درایورها بیشتر از درایور DCاست ، اما استفاده از موتورهایالقایی رو به افزایشاست و به دلیل مزایای آنها موتورهای DC را جایگزین میکنند.
در این مقاله در مورد راهاندازی ، ترمز و کنترل سرعت موتورهایالقایی خواهیم بود.
موتورالقایی سه فاز
2- راهاندازی موتورهایالقایی
ما میدانیم که موتورالقایی خود راه اندازاست ، یعنی وقتی منبع به موتور داده میشود ، بدون هیچ گونه کمک خارجی راهاندازی شده و شروع به چرخش میکند.
هنگامی که یک موتورالقایی استارت میشود در ابتدا مقاومت وجود ندارد (یعنی در هنگام راهاندازی)، یک جریان زیاد در مدار روتور ایجاد میشودکه،
ممکناست به طور دائمی به مدار روتور آسیب برساند. برای رفع این مشکل روشهای مختلفی برای محدود کردن جریان راهاندازی معرفی شدهاست. برخی از روش ها عبارت هستند از
- 1- راهاندازی با اتو ترانس
- 2- راهاندازی با راکتور
- 3- وراهاندازی ستاره مثلث
- 4- راهاندازی با راکتور اشباع شده یا همان سافت استارتر
- 5- راهاندازی با سیم پیچ چند بخشی
- 6- وراهاندازی با کنترل ولتاژ AC
- 7- استارت با مقاومت روتور، برای راهاندازی موتور روتور سیم پیچی شدهاستفاده میشود.
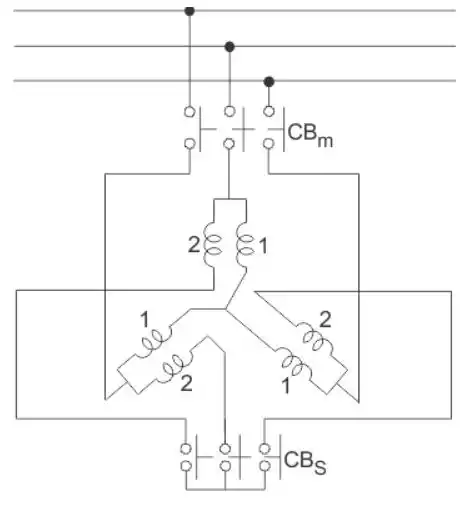
راهاندازی با روش ستاره مثلث
درایو موتورهایالقایی معمولاً برای اتصال مثلث طراحی شده اند ، اما در هنگام راهاندازی منبع تغذیه از اتصال ستاره داده میشود،
زیرا در این صورت ولتاژ استارت و جریان با1/√3 برابر از اتصال مثلث کاهش مییابد.
وقتی موتور به حالت پایدار میرسد ، اتصال از ستاره به اتصال مثلث تغییر میکند.
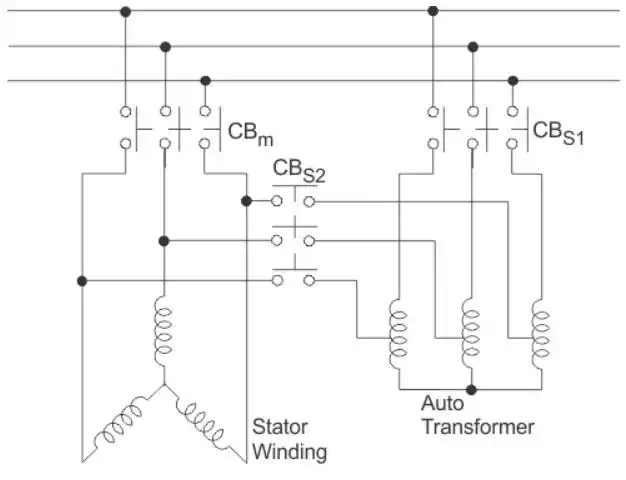
راهاندازی با اتو ترانس
نوع دیگر روش راهاندازی موتورهایالقایی ، راهاندازی با اتوترانسفورماتور میباشد. از آنجا که میدانیم گشتاور متناسب با توان 2 ولتاژاست.
توسط اتوترانسفورماتور ، ولتاژ و جریان راهاندازی کاهش مییابد تا مشکل گرمای بیش از حد به دلیل جریان بسیار زیاد حل شود.
در هنگام راهاندازی نسبت ترانسفورماتور به گونه ای تنظیم میشودکهجریان راهاندازی از حد ایمن تجاوز نکند.
هنگامی که موتورالقایی راهاندازی شد و به یک مقدار حالت پایدار رسید، اتوترانسفورماتور از منبع تغذیه جدا میشود.
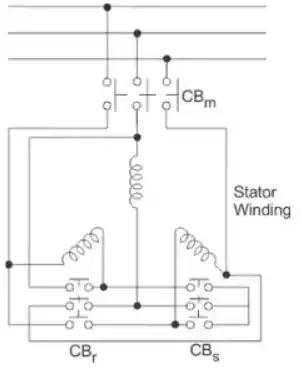
راهاندازی با راکتور
روشدیگر راهاندازی با استفاده از راکتور اشباع شونده یا سافت استارتراست.
در اینروش راکتانس بالا به مدار وارد میشود تا گشتاور راهاندازی به صفرمیرسد.
اکنون راکتانس در حین راهاندازی به آرامی کاهش مییابد و جریان راهاندازی افزایش مییابد و گشتاور نیز تغییر میکند.
در اینروش موتور بدون هیچ لرزش راهاندازی میشود و شتاب صافاست ، به همین دلیل به آن راهاندازی نرم نیز گفته میشود.
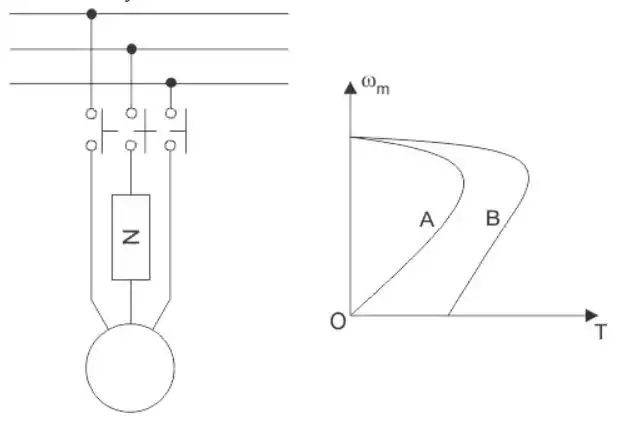
راهاندازی با سافت استارتر
طرح راهاندازی نامتوازن برای راهاندازی نرم نوع دیگری از روش راهاندازیاست که امپدانس فقط در یکی از فاز منبع قرار میگیرد.
هنگام راهاندازی امپدانس بسیار بالا نگه داشته میشود به گونه ای که موتور به عنوان موتور تک فاز عمل میکند ، ویژگی گشتاور سرعت در آن زمان شبیه به منحنی A در نموداراست.
هنگامی که سرعت به حالت پایداری برسد ، امپدانس به طور کامل برداشته میشود، در این زمان منحنی شبیه Bاست، که این خصوصیات طبیعی ماتین [1]است.
اینروش راهاندازی نیز بدون هیچ گونه حرکت تند و تیزاست و عملکرد بسیار رواناست.
راهاندازی سیم پیچ چند بخشی
روش راهاندازی سیم پیچ چند بخشی مخصوص موتورهایالقایی قفس سنجابیاست.
در اینروش دو یا چند سیم پیچ راهاندازی به طور موازی وصل میشوند. با راهاندازی موتور ، هر یک از سیم پیچ ها در نتیجه به هم وصل میشوند و مقاومت در استارت افزایش یافته و جریان راهاندازی کاهش مییابد.
هنگامی که سرعت پایدار توسط موتور به دست می آید ، سیم پیچ ها به هم وصل میشوند.
راهاندازی با مقاومت روتور
به طور خاص برای موتورهای روتور سیم پیچی شده ، از مقاومت در روتور استفاده میشود.
در اینروش از مقاومت های خارجی در مدار روتور برای محدود کردن جریان راهاندازی استفاده میشود.
حداکثر مقدار مقاومت برای محدود کردن جریان در سرعت صفر طوری انتخاب میشودکه جریان راهاندازی در محدوده ی مجاز باشد.
با افزایش سرعت ، مقاومت کاهش مییابد و تا به صفر میرسد، در اینروش افزایش دمای موتور کمتر از روش های دیگراست و
اینروش برای راهاندازی و متوقف کردن مکرر با بارهای سنگین میتواند استفادهشود
3- ترمز موتورهایالقایی
هنگام کنترل ماشین الکتریکی توسط درایو موتورهایالقایی ترمز اصطلاح بسیار مهمیاست زیرا این امر به کاهش سرعت موتور مطابق میل و ضرورت کمک میکند.
ترمز موتورهایالقایی را میتوان به طور عمده در سه نوع طبقه بندی کرد:
1- ترمز احیا کننده موتورالقایی ( ترمز فوق سنکرون)
2- ترمز معکوس موتورالقایی
3- و ترمز دینامیکی موتورالقایی که به روش های زیر نیز طبقه بندی میشود
- ترمز دینامیکی AC
- ترمز خود تحریک با استفاده از خازن ها
- وترمز دینامیکی DC
- ترمز توالی صفر
ترمز احیا کننده
برای توضیح ترمز احیا کننده (فوق سنکرون) برای موتورالقایی میتوان از معادله زیر کمک گرفت:
![]()
در اینجا ، θs زاویه فاز بین ولتاژ استاتور و جریان استاتور است ، هر زمان که این زاویه فاز از 90 درجه یعنی θs>90o عبور کند ، ترمز فوق سنکرون میتواند اتفاق بیفتد.
برای توضیح واضح تر و آسان تر میتوانیم بگوییم که هرگاه سرعت روتور از سرعت سنکرون بیشتر شود، ترمز احیا کننده انرژی یا فوق سنکرون رخ می دهد.
دلیل آن ایناست که هر زمان روتور با سرعتی بیش از سرعت سنکرون بچرخد ، یک میدان معکوس اتفاق می افتد که مخالف چرخش عادی موتوراست و بنابراین ترمز اتفاق می افتد.
نقطه ضعف اصلی این نوع ترمز ایناست که سرعت موتور باید بیش از سرعت سنکرون باشد که همیشه ممکن نیست.
برای به دست آوردن ترمز احیا کننده با سرعت پایین تر از سرعت سنکرون ، میتوان از منبع فرکانس متغیر استفادهکرد.

ترمز معکوس
ترمز معکوس با تعویض اتصال دو فاز از ۳ فاز موتور انجام میشود.
هنگامی که ترمینال ها معکوس میشوند ، عملکرد دستگاه از موتوری به حالت ترمزی تغییر پیدا میکند.
از نظر فنی و برای درک بهتر میتوان گفت لغزش از ‘s’ (2-s) تغییر میکند و این نشان می دهد که به تعویض ترمینال ها ، گشتاور نیز جهت خود را تغییر می دهد و ترمز اتفاق میافتد.

ترمز دینامیکی
-
ترمز دینامیکی AC
اولین طبقه بندی ترمز دینامیکی موتورهایالقایی ، ترمز دینامیکی AC است که یکی از فازها از منبع تغذیه جدا شده و سپس آن را باز نگه داشته و یا با فاز دیگر متصل میشود.
نوع اول به اتصال دو سر و نوع دوم به اتصال سر معروفاست. برای درک اینروش ترمز به روشنی میتوانیم فرض کنیم که این سیستم یک سیستم تک فازاست.
اکنون میتوان موتور را با ولتاژ توالی مثبت و منفی تغذیه کرد. به همین دلیل وقتی مقاومت روتور زیاداست گشتاور خالص منفیاست و ترمز ایجاد میشود.درایو موتورهایالقایی

-
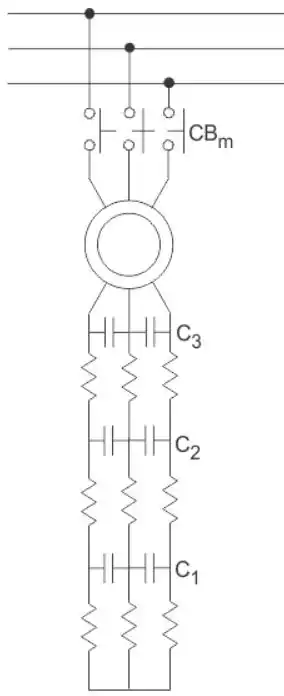
ترمز خود تحریک با استفاده از خازن ها
بعضی اوقات خازنها با اتصال به تمام ترمینالهای منبع موتور به صورت دائم نگه داشته میشوند.
به روش استفاده از خازنهای موتورهایالقایی ، ترمز خود تحریک گفته میشود.
این نوع ترمز عمدتا توسط خاصیت خازنها برای ذخیره انرژی کار میکند. هرگاه موتور از منبع تغذیه جدا شود،
موتور به عنوان ژنراتور القایی خود تحریک کار میکند، این نیرو از خازن های متصل به ترمینال ها حاصلمیشود.
مقادیر خازن به حدی انتخاب شدهاست که پس از قطع شدن از منبع، باعثشود موتور به عنوان مولد القایی کار کند.
هنگامی که موتور به عنوان مولد القایی کارمیکند، گشتاور تولید شده با چرخش عادی موتور مخالف است و از این رو ترمز اتفاق میافتد.

-
ترمز دینامیکی DC
نوع دیگر ترمز دینامیکی ترمز دینامیکی dcاست. در اینروش استاتور موتورالقایی در حال کار به منبع تغذیه dc متصل میشود.
نتیجه اتصال منبع تغذیه DC به استاتور به شرح زیراست ، جریان DC یک میدان مغناطیسی ثابت تولیدمیکند، روتور چرخش را ادامه می دهد و
در نتیجه یک ولتاژ القایی در سیم پیچ روتور به وجود می آید.
بنابراین دستگاه به عنوان ژنراتور کار میکند که با حرکت موتور مخالفاست و ترمز ایجادمیشود

4- کنترل سرعت موتورهایالقایی
ما در مورد راهاندازی و ترمز موتورهایالقایی بحث کرده ایم اما در مورد کنترل سرعت در طول عملکرد موتور چه میتوان گفت.
کنترل سرعت موتورهایالقایی با شش روش انجاممیشود
- 1- تغییر تعداد قطب
- 2- کنترل ولتاژ استاتور
- 3- کنترل فرکانس منبع
- 4- کوپلینگ ادی کارنت
- 5- کنترل مقاومت روتور
- 6- بازیابی لغزان
تغییر تعداد قطب
ما میدانیم که سرعت موتورالقایی به صورت معکوس با تعداد قطب ها متناسباست.
بنابراین اگر تعداد قطبها به ترتیب کم یا زیاد شوند ، میتوان سرعت موتورالقایی را افزایش یا کاهش داد.
موتوری که در آن امکان تغییر تعداد قطبها وجود دارد ، آنها را “موتور تغییر قطب ” یا “موتور چند سرعته” می نامند.
کنترل ولتاژ استاتور
روشدیگر کنترل سرعت درایوهای موتورالقایی کنترل ولتاژ استاتوراست.
ولتاژ استاتور مستقیماً مسئول سرعت چرخش روتوراست.
گشتاور متناسب با مربع ولتاژاست و جریان متناسب با ولتاژاست.
بنابراین اگر ولتاژ استاتور کم شود سرعت کاهش مییابد و به همین ترتیب اگر ولتاژ استاتور افزایش یابد سرعت نیز افزایش مییابد.

کنترل فرکانس منبع
سرعت یک موتورالقایی متناسب با ضرب فرکانس منبع و شار فاصله هواییاست.
اما از آنجا که احتمال اشباع مغناطیسی در حین کاهش فرکانس منبع وجود دارد ، به همین دلیل نه تنها فرکانس بلکه v / f یعنی
نسبت ولتاژ به فرکانس کنترل شده و سعی میشود این نسبت ثابت باقی بماند.
و اگر نیاز باشد که سرعت تغییر کند متناسب با آن نسبت V/F تغییر میکند.

کوپلینگ ادی کارنت
روش کنترل سرعت ادی کارنت Eddy current با قرار دادن یک کلاچ جریان ادی بین موتورالقایی با سرعت ثابت و بار سرعت متغیر انجاممیشود.
حالا این کلاچ ادی کارنت چیست؟ این چیزی نیست جز موتورهایالقایی که در آن هم استاتور و هم روتور مجاز به چرخش هستند.
روتور با موتورالقایی اصلی کوپلاست. هنگامی که جریان های گردابی در روتور تولید میشوند، تعامل آنها با میدان استاتور و گشتاور تولید میشود که موتور اصلی را می چرخاند.
با کنترل جریان DC از طریق سیم پیچ استاتور میتوان سرعت موتور را کنترل کرد.
کنترل مقاومت روتور
بسته به مقاومت روتور ، سرعت روتور کاهش یا افزایش مییابد.
تغییر ویژگی های گشتاور سرعت با توجه به تغییر در مقاومت روتور در شکل های زیر نشان داده شدهاست.
اینروش کنترل سرعت به دلیل کم هزینه بودن نسبت به بسیاری از روش های دیگر بهتراست.درایو موتورهایالقایی

مقالات مرتبط :